-
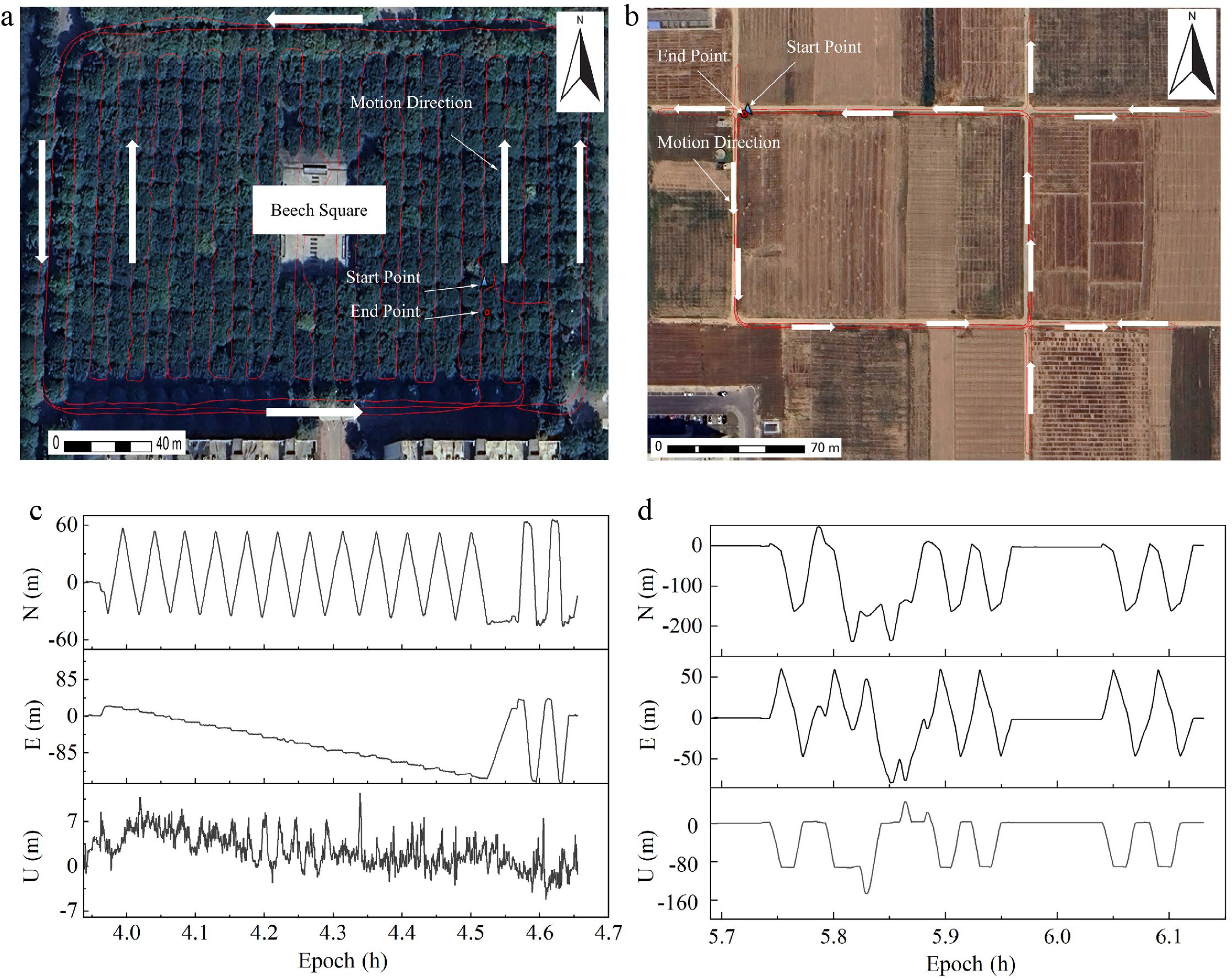
Figure 1.
Comparison of GNSS trajectories and coordinate components in different environments. (a) Forest trajectories, (b) open-sky trajectories, (c) forest, and (d) open-sky N/E/U components in the barycentric coordinate system.
-
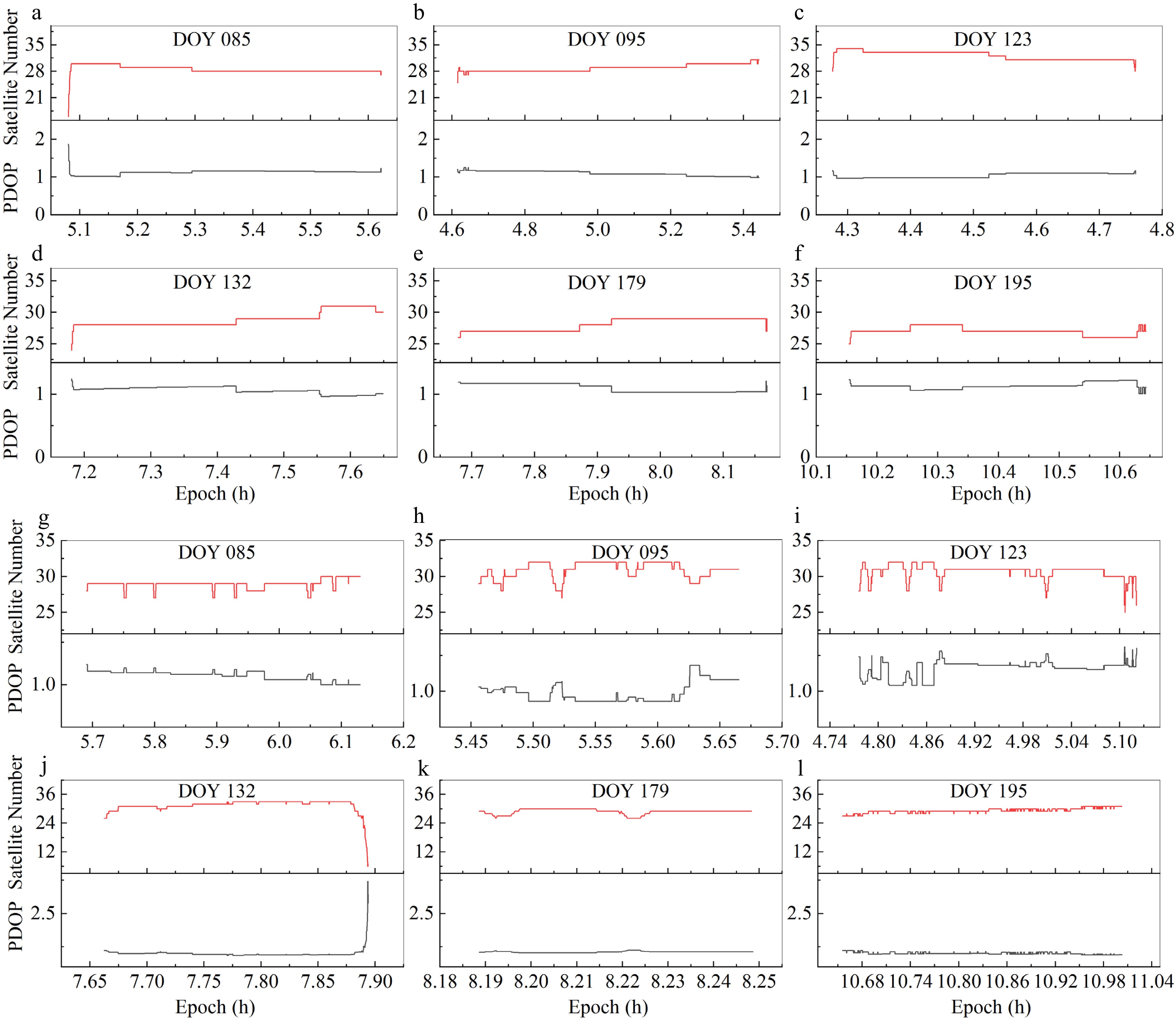
Figure 2.
Performance of satellite availability and PDOP in open-sky scenarios across different observation days. (a)–(f) Static mode for DOY 085, 095, 123, 132, 179, and 195, respectively. (g)–(l) Kinematic mode for the corresponding DOY sequence.
-
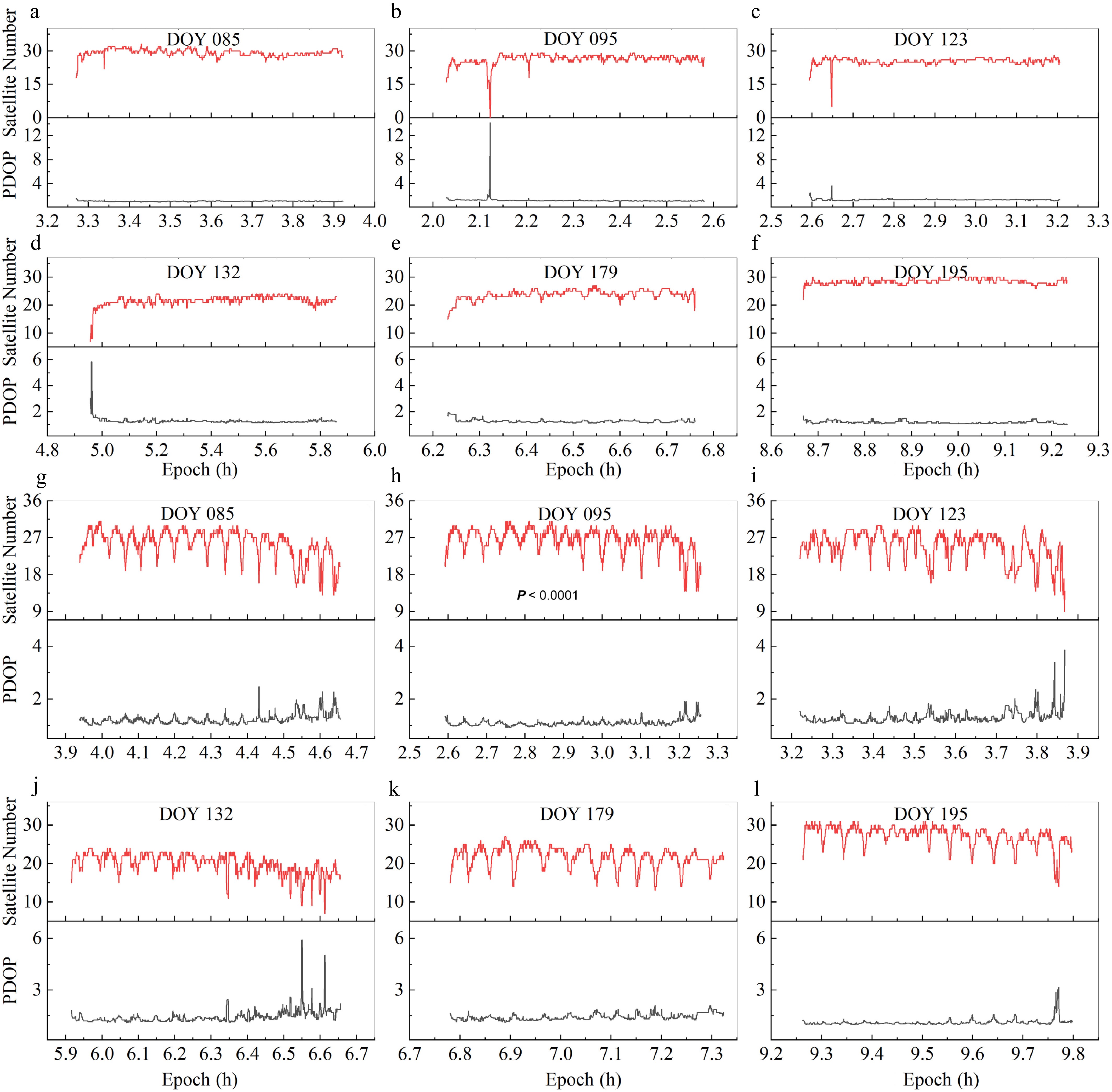
Figure 3.
Performance of satellite availability and PDOP under forest-obstructed environments across different observation days. (a)–(f) Static mode for DOY 085, 095, 123, 132, 179, and 195, respectively. (g)–(l) Kinematic mode for the corresponding DOY sequence.
-
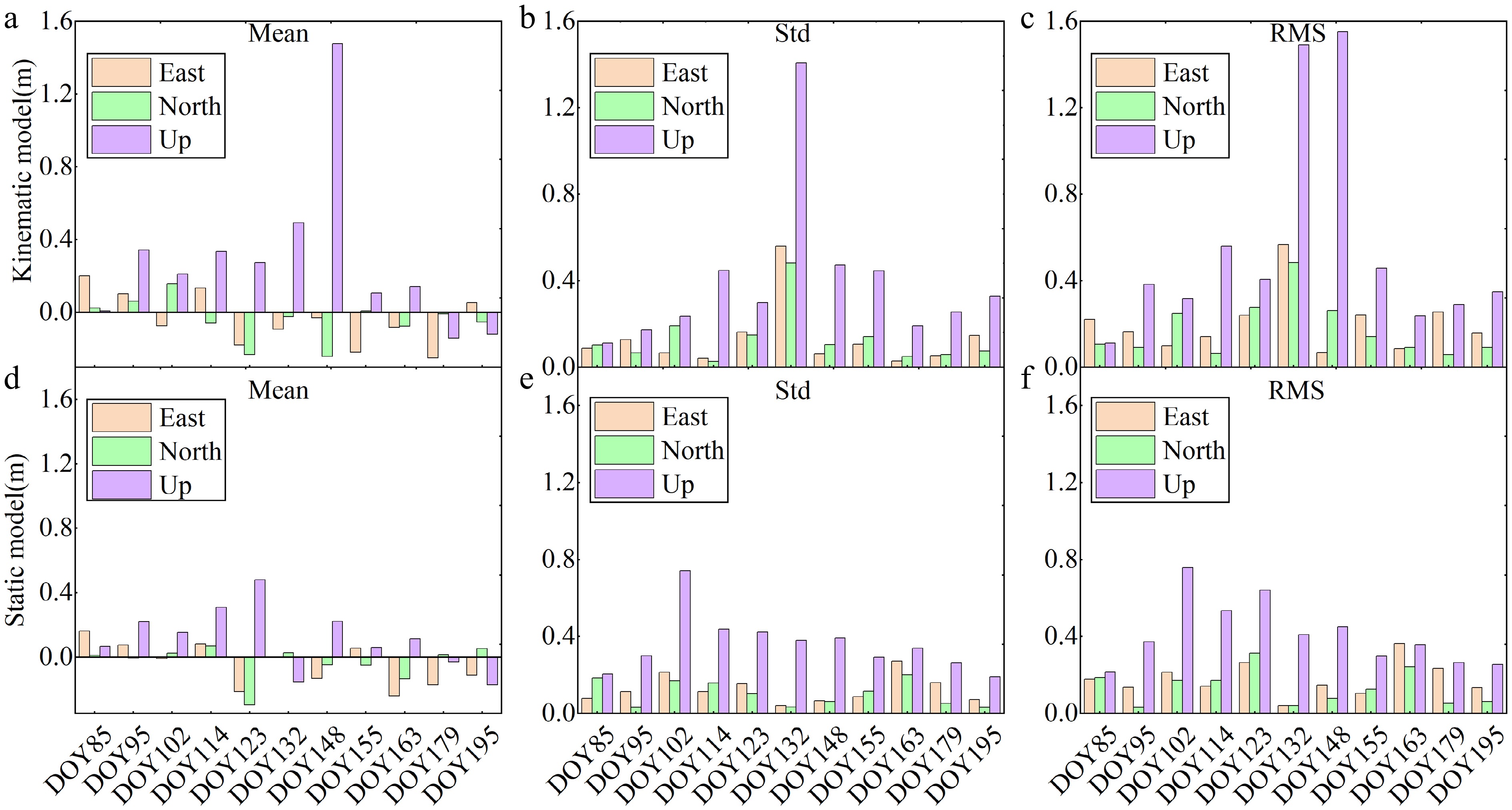
Figure 4.
Comparative statistical analysis of PPP positioning accuracy in open-sky scenarios (reference baseline). (a)–(c) Mean deviation, standard deviation (STD), and root mean square error (RMSE) for the kinematic mode. (d)–(f) Mean deviation, STD, and RMSE for the static mode.
-
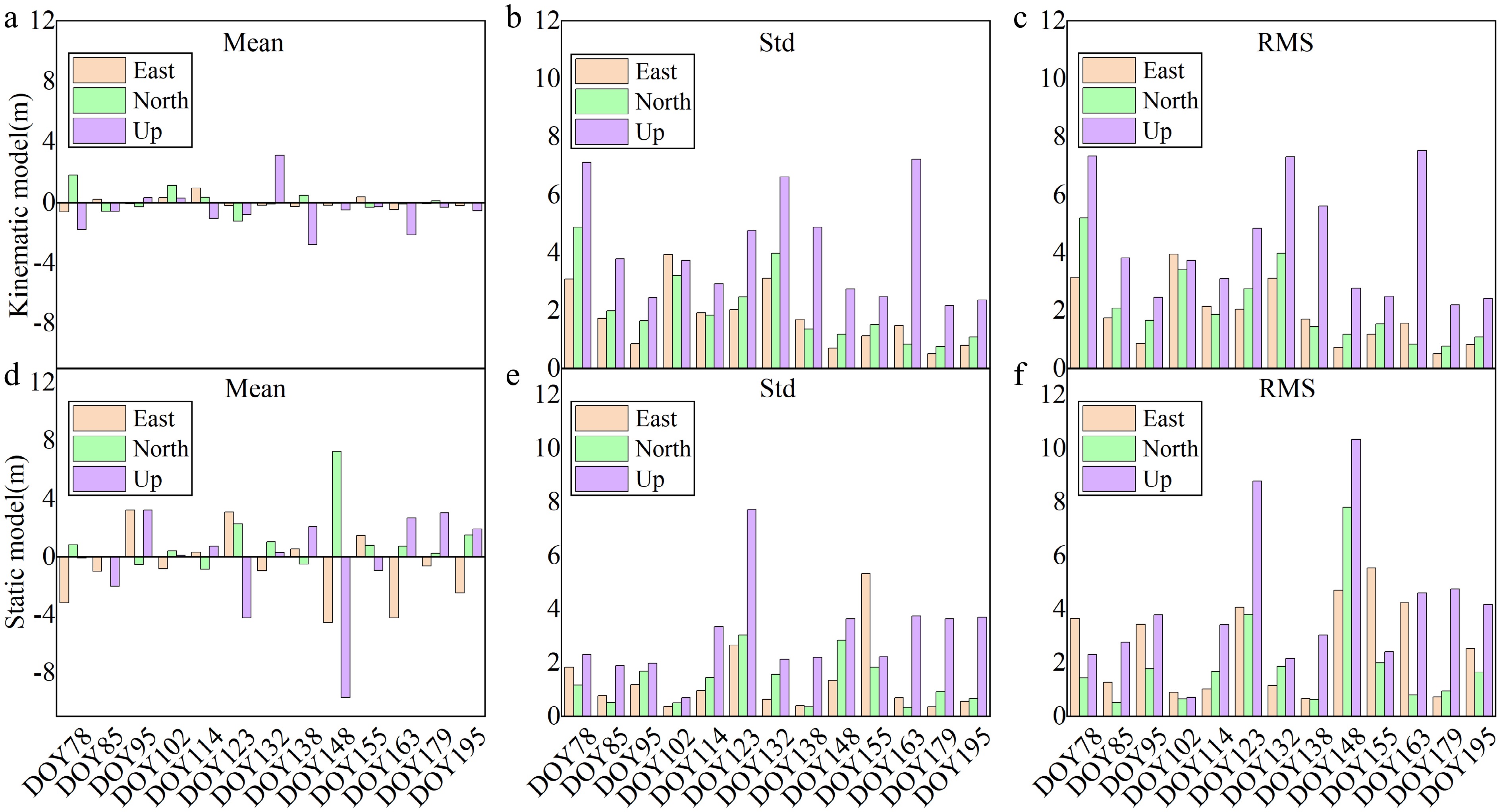
Figure 5.
Comparative statistical analysis of PPP positioning accuracy in forest-obstructed environments. (a)–(c) Mean, STD, and RMSE for the kinematic mode. (d)–(f) Mean, STD, and RMSE for the static mode.
-
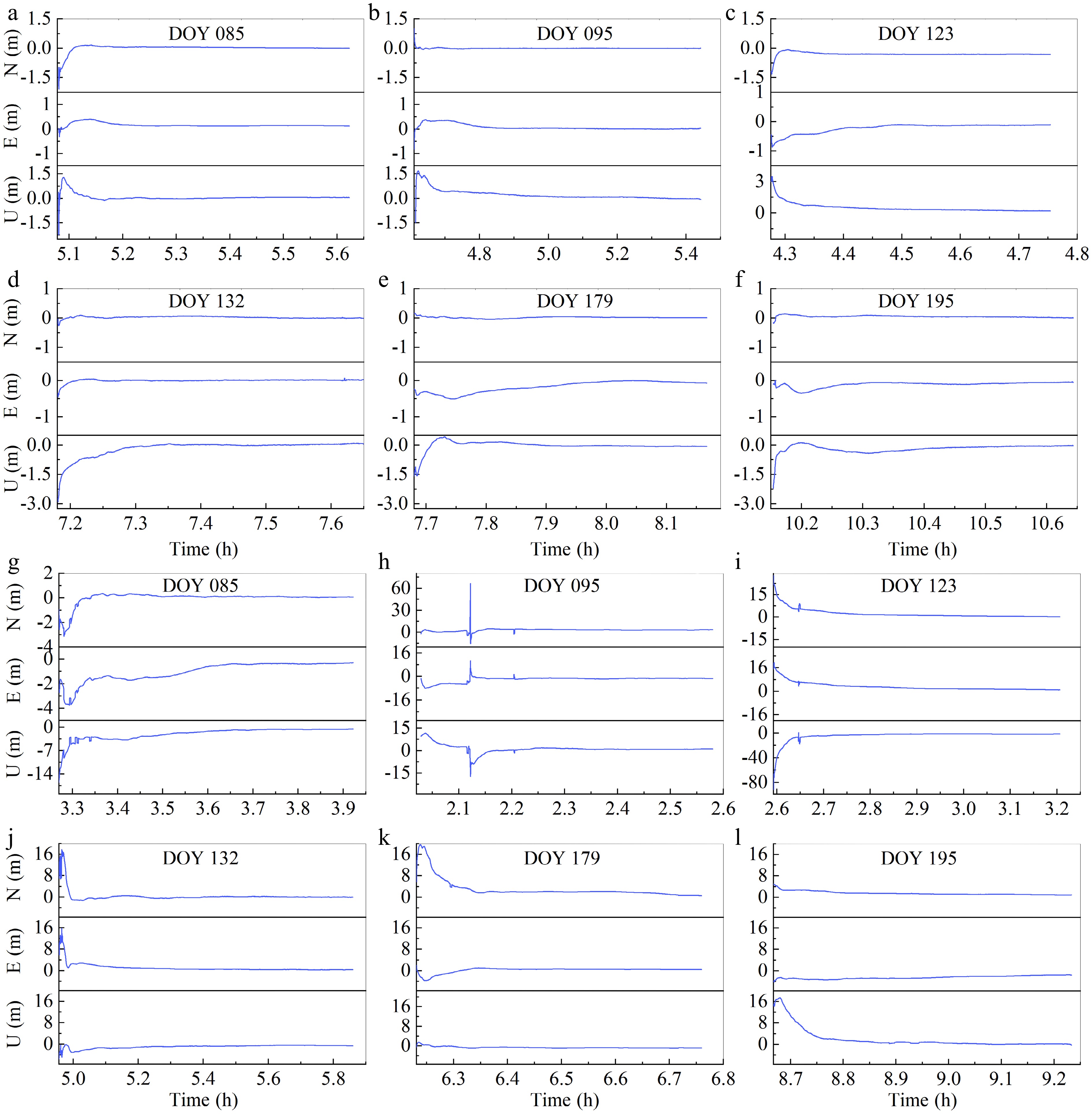
Figure 6.
Convergence behavior of static PPP under varying experimental scenarios. (a)–(f) Time-to-convergence in open-sky scenarios for DOY 085, 095, 123, 132, 179, and 195, respectively. (g)–(l) Corresponding convergence curves in forest-obstructed environments for the same DOY sequence.
-
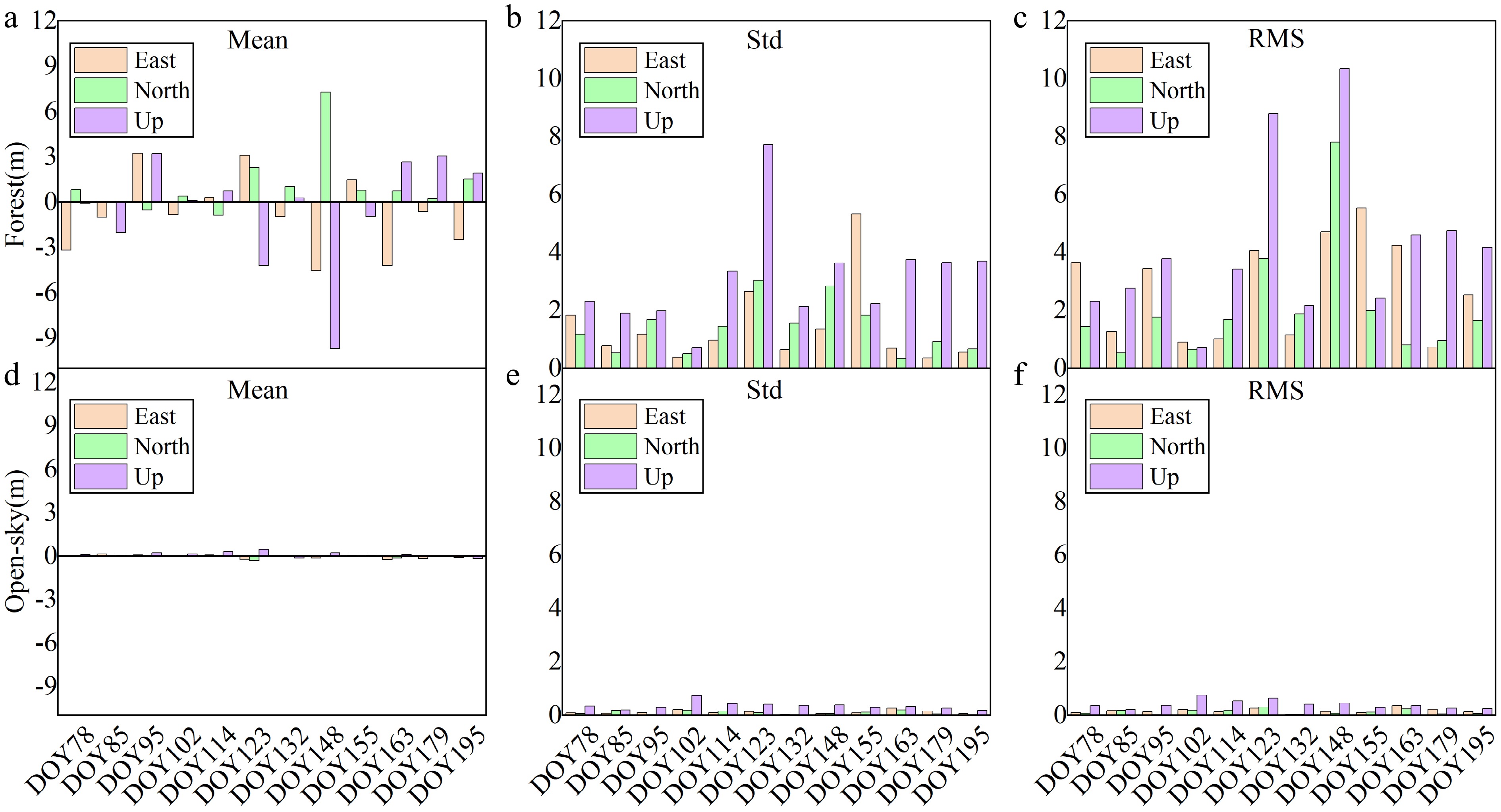
Figure 7.
Statistical accuracy comparison of static PPP between forest-obstructed and open-sky scenarios. (a)–(c) Mean deviation, standard deviation (STD), and root mean square error (RMSE) in forest-obstructed environments. (d)–(f) Mean deviation, STD, and RMSE in open-sky scenarios.
-
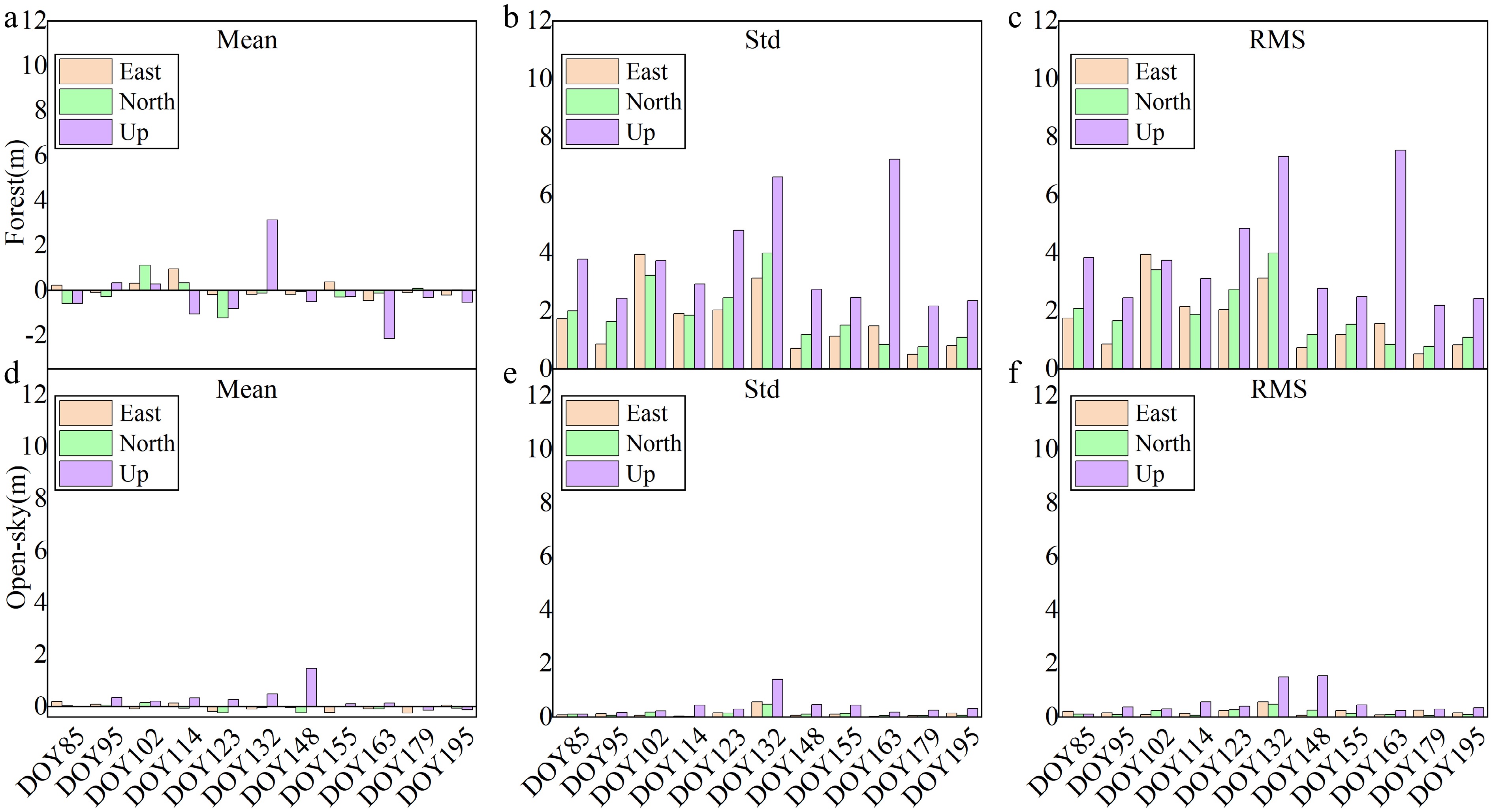
Figure 8.
Statistical accuracy comparison of kinematic PPP between forest-obstructed and open-sky scenarios. (a)–(c) Mean deviation, standard deviation (STD), and root mean square error (RMSE) in forest-obstructed environments. (d)–(f) Mean deviation, STD, and RMSE in open-sky scenarios.
-
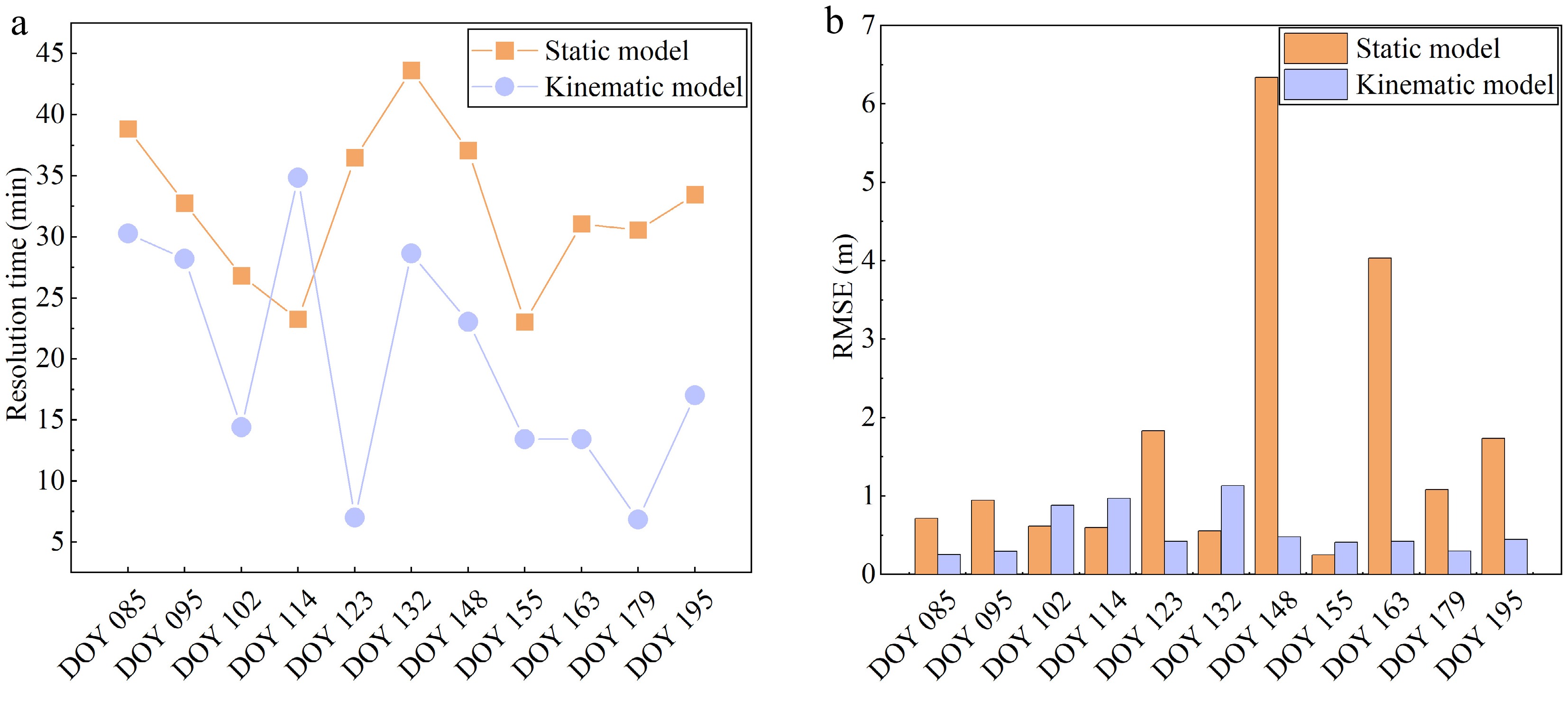
Figure 9.
(a) PPP convergence time statistics, and (b) 3D RMSE statistics.
-
Category Processing methods/strategies Data processing model Double Difference Precise Point Positioning GNSS system GPS/BDS/GLO/GAL GPS/BDS/GLO/GAL Observation type Ionosphere-free (IF) model Ionosphere-free (IF) model Combination model LC/PC ionospheric combination LC/PC ionospheric combination Stochastic model Elevation angle Elevation angle Parameter estimation method Kalman filtering Kalman filtering Orbit and clock offset Broadcast ephemeris Precise products Coordinate frame ITRF14 ITRF14 Antenna parameters of the receiver and satellite igs14.atx (GPS parameters for the uncalibrated frequencies) igs14.atx (GPS parameters for the uncalibrated frequencies) Data sampling interval 1 s 1 s Cut-off satellite elevation angle 10° 10° Estimating parameter Baseline vector Position and clock offset Table 1.
Precise Point Positioning and Double-Difference data processing models.
Figures
(9)
Tables
(1)