








-
In logic-based knowledge representation, conditionals (B|A) are used to express defeasible statements of the form 'if A holds, then usually B follows'. The formal semantics of such conditionals is typically given by preference relations over possible worlds. A widely used semi-quantitative way of expressing such preferences is constituted by ranking functions[1] which assign a degree of implausibility to possible worlds and based on that to formulas. A ranking function κ accepts a conditional if its verification is more plausible than its falsification,
$ \kappa(A \land B) \lt \kappa(A \land \neg B) $ $ \Delta $ $ \kappa $ $ \Delta $ In this paper, we identify a novel subclass of c-representations, the so-called core c-representations. Core c-representations are special because they rely on a simplified constraint satisfaction problem and, as a consequence, can be computed more easily. In fact, there is a stratification method for core c-representations which resolves the cyclic dependencies among the impact factors. Furthermore, core c-representations have a unique minimal representative which allows us to define an inductive inference operation, the so-called c-core closure, that selects for each consistent conditional belief base its minimal core c-representation to draw inferences from the belief base. Therewith, we bring together the goals of minimizing c-representations (cf.[4]) and stratification for the first time. In our context, stratification was formerly known from the System Z-like Z-c-representation only[2]. The Z-c-representation is another instance of the family of core c-representations which, however, usually computes impact factors that are far from being minimal.
This article is a revised and extended journal version of a previously published conference paper[5]. In contrast to the previous research by Wilhelm et al.[5], the present research provides proofs of all propositions, further explanations and intuitions, as well as an additional example which shows that generalized tolerance partitions are a proper superclass of tolerance partitions. Moreover, as a major novel contribution in this journal version, it is proven that c-core closure satisfies conditional syntax splitting, like skeptical c-inference over all c-representations[6,7], which was not thematized in the study by Wilhelm et al.[5]. This is particularly in contrast to p-entailment[8,9] and System Z inference[10], that both do not satisfy conditional syntax splitting. Here, it is shown that the latter inductive inference operators satisfy conditional relevance only. Altogether, the main contributions of this article are as follows:
● We define core c-representations as specific ranking models of consistent belief bases
$ \Delta $ $ \Delta $ ● We generalize the notion of tolerance partitions known from System Z and use them to show that core c-representations are stratified, and thus can be computed layer by layer.
● We prove that consistent belief bases have a unique (pareto-)minimal core c-representation.
● We introduce the inductive inference operator c-core closure which selects the minimal core c-representation of a belief base for drawing inferences.
● We show that c-core closure is based on an impact preserving selection strategy, satisfies conditional syntax splitting, and thus avoids the drowning problem.
The remainder of this article is organized as follows. In Section 2, we settle logical foundations on propositional and conditional logics in general and on c-representations in particular. In Section 3, we define core c-representations and present a constructive method for computing them that is based on a generalization of tolerance partitions of conditional belief bases. In Section 4, we show the existence of a unique minimal core c-representation. Based on this minimal core c-representation, we define the inductive inference operator c-core closure and analyze its properties in Section 5. Eventually, we discuss related work in Section 6 and conclude with an outlook in Section 7.
-
In this section, we settle the logical preliminaries of this work. We recall basics on propositional logics, introduce conditionals as representations of defeasible beliefs, interpret conditionals via ranking functions, and discuss with System P, System Z, lexicographic entailment, and c-representations, some well-established semantics of conditional belief bases.
2.1. Propositional logics
-
As a background language for conditionals, we consider a propositional language
$ {\cal{L}}(\Sigma) $ $ \Sigma $ $ \land $ $ \lor $ $ \neg $ $ A,B \in {\cal{L}}(\Sigma) $ $ A \land B $ $ AB $ $ \neg A $ $ {\overline A } $ $ A \lor {\overline A } $ $ \top $ $ A{\overline A } $ $ \bot $ $ \Sigma $ $ {\cal{L}}(\Sigma) $ $ 1 $ $ 0 $ $ I $ $ A $ $ I(A)=1 $ $ \models $ $ A \models B $ $ B $ $ A $ $ A $ $ B $ $ A \equiv B $ $ A \models B $ $ B \models A $ $ A $ $ {\mathrm{Cn}}(A) = \{ B \in {\cal{L}}(\Sigma) \mid A \models B \} $ $ \Sigma $ $ \Omega(\Sigma) $ $ \Sigma = \{a,b\} $ $ \Omega(\Sigma) = \{ ab, a{\overline b }, {\overline a b}, {\overline a \overline b }\} $ $ \Sigma' \subset \Sigma $ $ \Omega(\Sigma') $ $ \Sigma' $ $ \omega \in \Omega(\Sigma) $ $ \Sigma' $ $ \omega $ $ \Sigma' $ $ \omega|_{\Sigma'} = \bigwedge_{a \in \Sigma' \colon \omega \models a} a \land \bigwedge_{a \in \Sigma' \colon \omega \models {\overline a }} {\overline a } $ $ \{\Sigma_1, \ldots, \Sigma_m\} $ $ \Sigma $ $ \omega = \bigwedge_{i \in [m]} \omega|_{\Sigma_i} $ $ [m] $ $ \{1, \ldots, m\} $ 2.2. Conditionals and ranking functions
-
A conditional
$ (B|A) $ $ A $ $ B $ $ {\cal{L}}(\Sigma) $ $ A $ $ B $ $ \Delta $ $ (B|A) $ $ (D|C) $ $ (B|A) \equiv (D|C) $ $ A \equiv C $ $ AB \equiv CD $ $ \Sigma(\Delta) $ $ \Delta $ $ \Delta $ $ n = |\Delta| $ $ \Delta $ $ \Delta = \{ \delta_1, \ldots, \delta_n \} $ $ \delta_i = (B_i|A_i) $ $ i \in [n] $ The semantics of conditionals is given by ranking functions over possible worlds. A ranking function
$ \kappa \colon \Omega(\Sigma) \to {\mathbb{N}}_0 \cup \{\infty\} $ $ \Omega(\Sigma) $ $ \kappa^{-1}(0) \neq \emptyset $ $ \kappa(\omega) $ $ \omega $ $ \kappa^{-1}(0) $ $ {\mathrm{Bel}}(\kappa) = \bigcap\limits_{\omega \in \kappa^{-1}(0)} {\mathrm{Cn}}(\omega) $ is the belief set of a reasoner with belief state
$ \kappa $ $ \kappa $ $ \kappa $ $ (B|A) $ $ \kappa(AB) \lt \kappa(A{\overline B }) $ $ \kappa(A) = \min_{\omega \in \Omega(\Sigma) \colon \omega \models A} \kappa(\omega) $ $ A \in {\cal{L}}(\Sigma) $ $ \min \emptyset = \infty $ $ \kappa $ $ \Delta $ $ \kappa $ $ \Delta $ $ \Delta $ $ \Delta $ $ \kappa(\omega) $ $ \kappa $ $ {\mathbb{N}}_{>1} $ $ \delta = (B|A) $ $ {\mathrm{ver}}(\delta) = \{ \omega \in \Omega(\Sigma) \mid \omega \models AB \}, \;\;\; {\mathrm{fal}}(\delta) = \{ \omega \in \Omega(\Sigma) \mid \omega \models A{\overline B } \}, $ and the sets of conditionals from
$ \Delta $ $ \omega \in \Omega(\Sigma) $ $ {\mathrm{ver}}_\Delta(\omega) = \{ \delta_i \in \Delta \mid \omega \models A_i B_i \}, \;\;\;\;\;\; {\mathrm{fal}}_\Delta(\omega) = \{ \delta_i \in \Delta \mid \omega \models A_i {\overline{{{B}_{i}}}} \}. $ 2.3. System Z
-
For consistent belief bases
$ \Delta $ $ \Delta $ $ \Delta $ $ (B|A) $ $ \Delta $ $ \omega $ $ \omega \in {\mathrm{ver}}(\delta) $ $ \omega $ $ \delta $ $ {\mathrm{fal}}_\Delta(\omega) = \emptyset $ $ \omega $ $ \Delta $ $ (\Delta_1, \ldots, \Delta_m) $ $ \Delta $ $ \Delta $ $ i \in [m] $ $ \Delta_i $ $ \bigcup_{j=i}^m \Delta_j $ $ Z(\Delta) $ $ \Delta $ $ \Delta_1 $ $ \Delta $ $ \Delta $ $ Z_\Delta(\delta) $ $ \delta \in \Delta $ $ i $ $ \Delta_i \in Z(\Delta) $ $ \delta \in \Delta_i $ $ \delta $ $ \delta $ $ \Delta $ $ \kappa^Z_\Delta(\omega) = \begin{cases} 0, & \text{if}\; \; {\mathrm{fal}}_\Delta(\omega) = \emptyset \\ \max_{\delta \in {\mathrm{fal}}_\Delta(\omega)} Z_\Delta(\delta), & \text{otherwise} \end{cases}, \qquad \omega \in \Omega(\Sigma). $ (1) The ranking model
$ \kappa^Z_\Delta $ $ \Delta $ Example 1. We consider the well-known Tweety example
$ \Delta_{\mathrm{bfp}} = \{\delta_1, \delta_2, \delta_3\} $ $ \delta_1 = (b|p), \quad \delta_2 = (f|b), \quad \delta_3 = ({\overline f }|p), $ stating that penguins (like Tweety) are usually birds (
$ \delta_1 $ $ \delta_2 $ $ \delta_3 $ $ \Delta_{\mathrm{bfp}} $ $ Z(\Delta_{\mathrm{bfp}}) = (\Delta_1, \Delta_2) $ $ \Delta_1 = \{\delta_2\} $ $ \Delta_2 = \{\delta_1, \delta_3\} $ $ \kappa_{\Delta_{\mathrm{bfp}}}^Z(\omega) = \begin{cases} 0, & {if }\; \; \omega \in \{ bf\,{\overline p }, {\overline b }f\,{\overline p }, {\overline b }\, {\overline f } \,{\overline p } \} \\ 1, & {if }\; \; \omega \in \{ b{\overline f }\,{\overline p }, b{\overline f }p \} \\ 2, & {if }\; \; \omega \in \{bfp, {\overline b }fp, {\overline b }\,{\overline f }p \} \end{cases}. $ For instance, it states that, based on
$ \Delta_{\mathrm{bfp}} $ $ \kappa_{\Delta_{\mathrm{bfp}}}^Z(b{\overline f }p) = 1 \gt 0 = \kappa_{\Delta_{\mathrm{bfp}}}^Z(bf\,{\overline p }) = \min \{ \kappa_{\Delta_{\mathrm{bfp}}}^Z(bf\,{\overline p }), \kappa_{\Delta_{\mathrm{bfp}}}^Z(bfp)\} = \kappa_{\Delta_{\mathrm{bfp}}}^Z(bf). $ For more technical details on this example, please see the extended version in Example 12.
Note that we start the indexing of the subbases in
$ Z(\Delta) $ $ i=1 $ $ i=0 $ $ Z_\Delta(\delta) $ $ -1 $ $ +1 $ $ \kappa^Z_\Delta $ $ {\mathrm{fal}}_\Delta(\omega) \neq \emptyset $ 2.4. c-Representations
-
c-Representations[2] constitute another sophisticated class of ranking models. Let
$ \Delta $ $ |\Delta| = n $ $ \vec{\eta} = (\eta_1, \ldots, \eta_n) \in {\mathbb{N}}_0^n $ $ \kappa_\Delta^{\vec{\eta}}(\omega) = \sum\limits_{\delta_i \in {\mathrm{fal}}_\Delta(\omega)} \eta_i, \qquad \omega \in \Omega(\Sigma), $ (2) is a ranking model of
$ \Delta $ $ \kappa_\Delta^{\vec{\eta}} $ $ \Delta $ $ \Delta $ $ \vec{\eta} $ $ \kappa_\Delta^{\vec{\eta}} $ $ \Delta $ $ V_i $ $ F_i $ $ \begin{array}{*{20}{c}} \begin{array}{l} V_i = \{\{ \delta' \in \Delta \setminus \{\delta_i\} \mid \omega \in {\mathrm{fal}}(\delta') \} \mid \omega \in {\mathrm{ver}}(\delta_i) \} \\ F_i = \{\{ \delta' \in \Delta \setminus \{\delta_i\} \mid \omega \in {\mathrm{fal}}(\delta') \} \mid \omega \in {\mathrm{fal}}(\delta_i) \} \end{array}&{ , \qquad i \in [n], } \end{array} $ the acceptance condition
$ \kappa_\Delta^{\vec{\eta}}(A_i B_i) \lt \kappa_\Delta^{\vec{\eta}}(A_i {\overline{{{B}_{i}}}}) $ $ i $ $ \Delta $ $ \kappa_\Delta^{\vec{\eta}}(A_i B_i) \lt \kappa_\Delta^{\vec{\eta}}(A_i {\overline{{{B}_{i}}}}) $ $ \min_{\omega \in {\mathrm{ver}}(\delta_i)} \sum\nolimits_{\delta_j \in {\mathrm{fal}}_\Delta(\omega)} \eta_j \lt \min_{\omega \in {\mathrm{fal}}(\delta_i)} \sum\nolimits_{\delta_j \in {\mathrm{fal}}_\Delta(\omega)} \eta_j $ $ \min_{\omega \in {\mathrm{ver}}(\delta_i)} \sum\nolimits_{\delta_j \in {\mathrm{fal}}_{\Delta\setminus{\delta_i}}(\omega)} \eta_j \lt \eta_i + $ $ \min_{\omega \in {\mathrm{fal}}(\delta_i)} \sum\nolimits_{\delta_j \in {\mathrm{fal}}_{\Delta \setminus {\delta_i}}(\omega)} \eta_j $ $ C_i \colon \quad \eta_i \gt \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in V_i \} - \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in F_i \}. $ (3) The set
$ {\mathrm{CSP}}(\Delta) = \{C_1,\ldots,C_n\} $ $ \Delta $ $ {\mathrm{CSP}}(\Delta) $ $ \Delta $ $ \Delta $ Example 2. As a running example, we consider the belief base
$ \Delta_{\mathrm{ex}} = \{ \delta_1, \ldots, \delta_5 \} $ $ \delta_1 = (b|a), \quad \delta_2 = ({\overline a }|{\overline b }), \quad \delta_3 = ({\overline a }|b \lor c), \quad \delta_4 = (a|bc), \quad \delta_5 = ({\overline c }|ab). $ The sets
$ {\mathrm{ver}}_{\Delta_{\mathrm{ex}}}(\omega) $ $ {\mathrm{fal}}_{\Delta_{\mathrm{ex}}}(\omega) $ $ V_i $ $ F_i $ $ {\mathrm{CSP}}(\Delta_{\mathrm{ex}}) = \{ C_1, \ldots, C_5 \} $ $\begin{array}{*{20}{l}} {{C_1}:\quad {\eta _1} \gt \min \{ {\eta _3},{\eta _3} + {\eta _5}\} }&{ - \min \{ {\eta _2},{\eta _2} + {\eta _3}\} ,}\\ {{C_2}:\quad {\eta _2} \gt \min \{ 0\} }&{ - \min \{ {\eta _1},{\eta _1} + {\eta _3}\} ,}\\ {{C_3}:\quad {\eta _3} \gt \min \{ 0,{\eta _4}\} }&{ - \min \{ 0,{\eta _5},{\eta _1} + {\eta _2}\} ,}\\ {{C_4}:\quad {\eta _4} \gt \min \{ {\eta _3} + {\eta _5}\} }&{ - \min \{ 0\} ,}\\ {{C_5}:\quad {\eta _5} \gt \min \{ {\eta _3}\} }&{ - \min \{ {\eta _3}\} .} \end{array}$ $ {\mathrm{CSP}}(\Delta_{\mathrm{ex}}) $ $ (1,1,1,3,1) $ $ (2,0,1,3,1) $ $ (0,2,1,3,1) $ $ {\mathrm{CSP}}(\Delta_{\mathrm{ex}}) $ Table 1. Verified and falsified conditionals from $ \Delta_{\mathrm{ex}} $ (cf. Example 2).
$ \omega $ $ {\mathrm{ver}}_{\Delta_{\mathrm{ex}}}(\omega) $ $ {\mathrm{fal}}_{\Delta_{\mathrm{ex}}}(\omega) $ $ \omega $ $ {\mathrm{ver}}_{\Delta_{\mathrm{ex}}}(\omega) $ $ {\mathrm{fal}}_{\Delta_{\mathrm{ex}}}(\omega) $ $ abc $ $ \{\delta_1,\delta_4\} $ $ \{\delta_3,\delta_5\} $ $ {\overline a b}c $ $ \{\delta_3\} $ $ \{\delta_4\} $ $ ab{\overline c } $ $ \{\delta_1,\delta_5\} $ $ \{\delta_3\} $ $ {\overline a b}{\overline c } $ $ \{\delta_3\} $ $ \emptyset $ $ a{\overline b }c $ $ \emptyset $ $ \{\delta_1,\delta_2,\delta_3\} $ $ {\overline a \overline b }c $ $ \{\delta_2,\delta_3\} $ $ \emptyset $ $ a{\overline b }{\overline c } $ $ \emptyset $ $ \{\delta_1, \delta_2\} $ $ {\overline a \overline b }{\overline c } $ $ \{\delta_2\} $ $ \emptyset $ Table 2. (Reduced) constraint inducing sets of the conditionals in $ \Delta_{\mathrm{ex}} $ (cf. Examples 2 and 3).
$ \delta_i $ $ V_i $ $ F_i $ $ \hat{V}_i $ $ \hat{V}_i $ $ \delta_1 = (b|a) $ $ \{ \{\delta_3\}, \{\delta_3, \delta_5\} \} $ $ \{ \{\delta_2\}, \{\delta_2, \delta_3\} \} $ $ \{ \{\delta_3\} \} $ $ \{ \{\delta_2\} \} $ $ \delta_2 = ({\overline a }|{\overline b }) $ $ \{ \emptyset \} $ $ \{ \{\delta_1\}, \{\delta_1, \delta_3\} \} $ $ \{ \emptyset \} $ $ \{ \{\delta_1\} \} $ $ \delta_3 = ({\overline a }|b \lor c) $ $ \{ \emptyset, \{\delta_4\} \} $ $ \{ \emptyset, \{\delta_5\}, \{\delta_1, \delta_2\} \} $ $ \{ \emptyset \} $ $ \{ \emptyset \} $ $ \delta_4 = (a|bc) $ $ \{ \{\delta_3, \delta_5\} \} $ $ \{ \emptyset \} $ $ \{ \{\delta_3, \delta_5\} \} $ $ \{ \emptyset \} $ $ \delta_5 = ({\overline c }|ab) $ $ \{ \{\delta_3\} \} $ $ \{ \{\delta_3\} \} $ $ \{ \emptyset \} $ $ \{ \emptyset \} $ For comparing the solutions
$ \vec{\eta} $ $ {\mathrm{CSP}}(\Delta) $ $ \kappa^{\vec{\eta}}_\Delta $ $ \vec{\eta} \preccurlyeq_O \vec{\eta} {\, '} $ $ \kappa^{\vec{\eta}}_\Delta(\omega) \leq \kappa^{\vec{\eta} {\, '}}_\Delta(\omega) $ $ \omega \in \Omega(\Sigma) $ $ \vec{\eta} $ $ \preccurlyeq_O $ $ \vec{\eta} {\, '} $ $ {\mathrm{CSP}}(\Delta) $ $ \vec{\eta} {\, '} \preccurlyeq_O \vec{\eta} $ $ \vec{\eta} \not\preccurlyeq_O \vec{\eta} {\, '} $ $ \Delta_{\mathrm{ex}} $ $ {\mathrm{CSP}}(\Delta_{\mathrm{ex}}) $ $ \Delta $ $ {\mathrm{CSP}}(\Delta) $ $ \Delta $ 2.5. Constraint reductions for c-representations
-
When computing a c-representation of a consistent belief base
$ \Delta $ $ {\mathrm{CSP}}(\Delta) $ $ C_1 $ $ \eta_1 \gt \eta_3 - \eta_2 $ $ {\mathrm{CSP}}(\Delta) $ $ V_i $ $ F_i $ $ i \in [n] $ $ {\mathrm{CSP}}(\Delta) $ 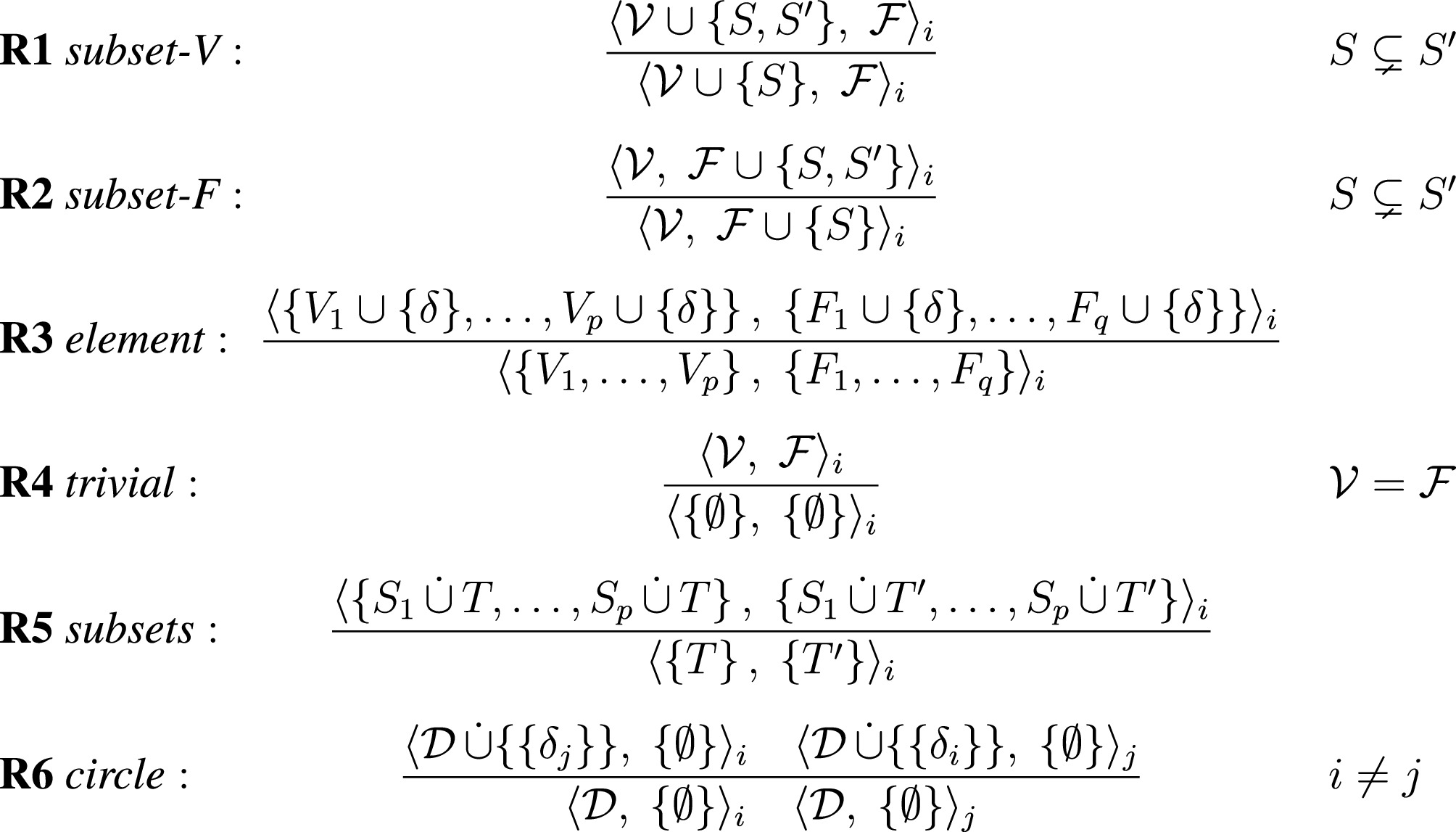
Figure 1.
Transformation rules for simplifying the constraint satisfaction problem $ {\mathrm{CSP}}(\Delta) $. A pair ${\langle { {\cal{V}}},\; { {\cal{F}}} \rangle_{{i}}} $ represents the sets of constraint variables in the minimum expressions associated to the verification and the falsification, respectively, of the $ i $-th conditional $ \delta_i \in \Delta $ in the constraint $ C_i \in {\mathrm{CSP}}(\Delta) $ modeling the acceptance condition of $ \delta_i $.
$ {\bf{R1}} $ $ S,S' \in V_i $ $ S \subsetneq S' $ $ V_i \leftarrow V_i \setminus \{S'\} $ $ {\bf{R2}} $ $ S,S' \in F_i $ $ S \subsetneq S' $ $ F_i \leftarrow F_i \setminus \{S'\} $ $ {\bf{R3}} $ $ V_i \neq \{\emptyset\} $ $ F_i \neq \{\emptyset\} $ $ \delta_j \in S $ $ S \in V_i \cup F_i $ $ V_i \leftarrow \{ S \setminus \{\delta_j\} \mid S \in V_i\} $ $ F_i \leftarrow \{ S \setminus \{\delta_j\} \mid S \in F_i\} $ $ {\bf{R4}} $ $ V_i = F_i $ $ V_i \leftarrow \{\emptyset\} $ $ F_i \leftarrow \{\emptyset\} $ $ {\bf{R5}} $ $ {\cal{D}} \subseteq 2^\Delta $ $ T,T' \subseteq \Delta $ $ V_i = \{ S {\dot \cup} T \mid S \in {\cal{D}} \} $ $ F_i = \{ S {\dot \cup} T' \mid S \in {\cal{D}} \} $ $ V_i \leftarrow \{T\} $ $ F_i \leftarrow \{T'\} $ $ {\bf{R6}} $ $ F_i = F_j = \{\emptyset\} $ $ i \neq j $ $ {\cal{D}} \subseteq 2^\Delta $ $ V_i = {\cal{D}} {\dot \cup} \{\{\delta_j\}\} $ $ V_j = {\cal{D}} {\dot \cup} \{\{\delta_i\}\} $ $ V_i \leftarrow {\cal{D}} $ $ V_j \leftarrow {\cal{D}} $ The transformation rules R1–R6 rely on basic laws of minimization and arithmetics. Note that some of them take both
$ V_i $ $ F_i $ $ \hat{V}_i $ $ \hat{F}_i $ $ i \in [n] $ $ V_i $ $ F_i $ $ \Delta $ $ {\mathrm{CSP}}(\Delta) $ $ {\mathrm{CSP}}^\wedge(\Delta) = \{ \hat{C}_1, \ldots, \hat{C}_n \} $ $ \hat{C}_i \colon \quad \eta_i \gt \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \} - \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{F}_i \}. $ (4) Thus,
$ \hat{C}_i $ $ C_i $ $ V_i $ $ F_i $ $ \hat{V}_i $ $ \hat{F}_i $ Proposition 1. Let
$ \Delta $ $ {\mathrm{CSP}}^\wedge(\Delta) $ $ {\mathrm{CSP}}(\Delta) $ $ {\mathrm{CSP}}^\wedge(\Delta) $ Proof. First, we prove, rule by rule, that applying any transformation rule from R1–R6 preserves the solutions of
$ {\mathrm{CSP}}(\Delta) $ $ {\underline{{\rm{R1}}:}} $ $ S,S'\in V_i $ $ S\subsetneq S' $ $ V_i'=V_i\setminus\{S'\} $ $ \sum\limits_{\delta_j\in S'} \eta_j = \sum\limits_{\delta_j\in S} \eta_j + \sum\limits_{\delta_j\in S'\setminus S} \eta_j \geq \sum\limits_{\delta_j\in S} \eta_j $ and, hence,
$ \min\{\sum\limits_{\delta_j\in S} \eta_j\mid S\in V_i'\} = \min\{\sum\limits_{\delta_j\in S} \eta_j\mid S\in V_i\}. $ $ {\underline{{\rm{R2}}:}} $ $ {\underline{{\rm{R3}}:}} $ $ \delta_j\in S $ $ S\in V_i\cup F_i $ $ V_i'=\{S\setminus\{\delta_j\}\mid S\in V_i\} $ $ F_i'=\{S\setminus\{\delta_j\}\mid S\in F_i\} $ $ \begin{array}{l} \;\;\;\; \min\{ \sum\limits_{\delta_k\in S} \eta_k\mid S\in V_i\} - \min\{ \sum\limits_{\delta_k\in S} \eta_k\mid S\in F_i\} \\ =\ \min\{\eta_j+ \sum\limits_{\delta_k\in S\setminus\{\delta_j\}} \eta_k\mid S\in V_i\} - \min\{\eta_j+ \sum\limits_{\delta_k\in S\setminus\{\delta_j\}} \eta_k\mid S\in F_i\} \\ =\ \eta_j+\min\{\sum\limits_{\delta_k\in S\setminus\{\delta_j\}} \eta_k\mid S\in V_i\} - \eta_j-\min\{\sum\limits_{\delta_k\in S\setminus\{\delta_j\}} \eta_k\mid S\in F_i\} \\ =\ \min\{\sum\limits_{\delta_k\in S} \eta_k\mid S\in V_i'\} - \min\{\sum\limits_{\delta_k\in S} \eta_k\mid S\in F_i'\}. \end{array}$ $ {\underline{{\rm{R4}}:}} $ $ V_i=F_i $ $ \begin{array}{l}\;\;\;\; \min\{\sum\limits_{\delta_j\in S}\eta_j\mid S\in V_i\} - \min\{\sum\limits_{\delta_j\in S}\eta_j\mid S\in F_i\} \\ =\ \min\{\sum\limits_{\delta_j\in S}\eta_j\mid S\in V_i\} - \min\{\sum\limits_{\delta_j\in S}\eta_j\mid S\in V_i\} \\ =\ 0 \\ =\ \min\{\sum\limits_{\delta_j\in S} \eta_j \mid S\in \emptyset\} - \min\{\sum\limits_{\delta_j\in S} \eta_j \mid S\in \emptyset\}. \end{array} $ $ {\underline{{\rm{R5}}:}} $ $ {\cal{D}}\subseteq 2^\Delta $ $ T,T'\subseteq \Delta $ $ V_i=\{S{\dot \cup} T\mid S\in{\cal{D}} \} $ $ F_i=\{S{\dot \cup} T'\mid S\in{\cal{D}} \} $ $ \begin{array}{l}\;\;\;\; \min\{ \sum\limits_{\delta_j\in S} \eta_j\mid S\in V_i\} - \min\{ \sum\limits_{\delta_j\in S} \eta_j\mid S\in F_i\} \\ =\ \min\{\sum\limits_{\delta_j\in S} \eta_j + \sum\limits_{\delta_j\in T} \eta_j\mid S\in{\cal{D}} \} -\min\{\sum\limits_{\delta_j\in S} \eta_j + \sum\limits_{\delta_j\in T'} \eta_j\mid S\in{\cal{D}} \} \\ =\ \sum\limits_{\delta_j\in T} \eta_j + \min\{\sum\limits_{\delta_j\in S} \eta_j \mid S\in{\cal{D}} \} -\sum\limits_{\delta_j\in T'} \eta_j-\min\{\sum\limits_{\delta_j\in S} \eta_j \mid S\in{\cal{D}} \} \\ =\ \sum\limits_{\delta_j\in T} \eta_j - \sum\limits_{\delta_j\in T'} \eta_j. \end{array} $ $ {\underline{{\rm{R6}}:}} $ $ F_i=F_j=\emptyset $ $ i\neq j $ $ {\cal{D}}\subseteq 2^\Delta $ $ V_i={\cal{D}}{\dot \cup} \{\{\delta_j\}\} $ $ V_j={\cal{D}}{\dot \cup} \{\{\delta_i\}\} $ Then Eq. (3) becomes
$\begin{array}{l} \eta_i \gt \min(\{\sum\limits_{\delta_k\in S} \eta_k \mid S\in {\cal{D}}\} \cup \{\eta_j\})=:\min {\cal{H}}_i, \\ \eta_j \gt \min(\{\sum\limits_{\delta_k\in S} \eta_k \mid S\in {\cal{D}}\} \cup \{\eta_i\})=:\min {\cal{H}}_j. \end{array} $ Assume
$ \eta_j=\min {\cal{H}}_i $ $ \eta_i=\min {\cal{H}}_j $ $ \eta_i \gt \eta_j $ $ \eta_j>\eta_i $ $ \eta_j =\min {\cal{H}}_i $ $ H=\min {\cal{H}}_j $ $ H\in \{\sum\nolimits_{\delta_k\in S} \eta_k\mid S\in {\cal{D}}\} $ $ H<\eta_i $ $ \eta_j>H $ $ \eta_j $ $ {\cal{H}}_i $ $ H\in{\cal{H}}_i $ $ \eta_j $ $ {\cal{H}}_i $ $ \eta_i $ $ {\cal{H}}_j $ $ \eta_i \gt \min\{\sum\limits_{\delta_k\in S} \eta_k\mid S\in{\cal{D}}\}, \quad \eta_j \gt \min\{\sum\limits_{\delta_k\in S} \eta_k\mid S\in{\cal{D}}\}, $ which proves the statement.
For showing that
$ {\mathrm{CSP}}^\wedge(\Delta) $ $ \langle {\cal{V}}, {\cal{F}}\rangle $ $ {\mathrm{CSP}}^\wedge(\Delta) $ $ \phi_j(V_i) $ $ \phi_j(F_i) $ $ V_i $ $ F_i $ $ \phi_j $ There are some pairs of transformation rules which trivially commute, for instance because they do not interfere. This holds, among others, for all pairs (Ri, Ri), the pair (R1, R2), or if transformation rules are applied to constraint inducing sets of different conditionals (as long as R6 is not involved). We omit these trivial cases and analyze the more interesting cases in detail.
$ {\underline{({\rm{R1}}, {\rm{R3}}):}} $ $ S,S'\in V_i $ $ S\subsetneq S' $ $ \delta_j\in T $ $ T\in V_i\cup F_i $ $ \phi_3(\phi_1(V_i))=\phi_3(V_i\setminus\{S'\}) =\{T\setminus\{\delta_j\}\mid T\in V_i\setminus\{S'\}\} $ because
$ \delta_j\in T $ $ T \in \phi_1(V_i) $ $ \phi_1(\phi_3(V_i))=\phi_1(\{T\setminus\{\delta_j\}\mid T\in V_i\}) = \{T\setminus\{\delta_j\}\mid T\in V_i\setminus\{S'\}\}. $ The latter holds, because
$ S\subsetneq S' $ $ S\setminus\{\delta_j\}\subsetneq S'\setminus\{\delta_j\} $ $ F_i $ $ \phi_3(\phi_1(F_i))=\phi_3(F_i)=\phi_1(\phi_3(F_i)). $ $ {\underline{({\rm{R1}}, {\rm{R4}}):}} $ $ S,S'\in V_i $ $ S\subsetneq S' $ $ V_i=F_i $ $ \phi_1(\phi_4(V_i))=\phi_1(\emptyset)=\emptyset {\; \; \text{and}\; \; } \phi_1(\phi_4(F_i))=\phi_1(\emptyset)=\emptyset. $ Applying R1 to
$ V_i $ $ \phi_1(V_i)\neq F_i $ $ S,S'\in V_i $ $ S\subsetneq S' $ $ V_i=F_i $ $ F_i $ $ \phi_2(F_i)=\phi_1(V_i) $ $ V_i $ $ F_i $ $ \emptyset $ $ {\underline{({\rm{R1}}, {\rm{R5}}):}} $ $ S,S'\in V_i $ $ S\subsetneq S' $ $ {\cal{D}}\subseteq 2^\Delta $ $ T,T'\subseteq \Delta $ $ V_i=\{R{\dot \cup} T\mid R\in {\cal{D}}\} $ $ F_i=\{R{\dot \cup} T'\mid R\in {\cal{D}}\} $ $ S=R{\dot \cup} T $ $ S'=R'{\dot \cup} T $ $ R,R'\in {\cal{D}} $ $ R\subsetneq R' $ $ \hat{S}=R{\dot \cup} T' $ $ \hat{S'}=R'{\dot \cup} T' $ $ F_i $ $ \hat{S}\subsetneq\hat{S}' $ $ V_i $ $ \phi_1(V_i) = \{R{\dot \cup} T\mid R\in{\cal{D}}\setminus\{R'\}\}. $ $ F_i $ $ \phi_2(F_i)=\{R{\dot \cup} T'\mid R\in{\cal{D}}\setminus\{R'\}\}. $ $ \phi_5(\phi_1(V_i))=\{T\} {\; \; {{\rm{and}}}\; \; } \phi_5(\phi_2(F_i))=\{T'\}. $ If one applies R5 first, one directly obtains
$ \phi_5(V_i)=\{T\} {\; \; \text{and}\; \; } \phi_5(F_i)=\{T'\}. $ $ {\underline{({\rm{R1}}, {\rm{R6}}):}} $ $ S,S'\in V_i $ $ S\subsetneq S' $ $ {\cal{D}}\subseteq 2^\Delta $ $ V_i={\cal{D}}{\dot \cup}\{\{\delta_j\}\} $ $ V_j={\cal{D}}{\dot \cup}\{\{\delta_i\}\} $ $ T\in{\cal{D}} $ $ \delta_i\in T $ $ {\cal{D}}\subseteq V_i $ $ \delta_j\in T $ $ {\cal{D}}\subseteq V_j $ $ S'=\{\delta_j\} $ $ S=\emptyset $ $ \phi_1(V_i)=\phi_1({\cal{D}}) $ $ S\in {\cal{D}} $ $ S\in V_j $ $ \{\delta_i\}\in V_j $ $ S=\emptyset $ $ \{\delta_i\} $ $ V_j $ $ \phi_1(V_j)=\phi_1({\cal{D}}) $ $ \phi_6(\phi_1(V_i))=\phi_1({\cal{D}})=\phi_6(\phi_1(V_j)). $ If
$ S'\neq \{\delta_j\} $ $ {\cal{D}} $ $ {\cal{D}} $ $ F_i $ $ \phi_1(\phi_6(V_i))=\phi_1({\cal{D}}) = \phi_1(\phi_6(V_j)). $ $ {\underline{({\rm{R2}}, {\rm{R3}}), ({\rm{R2}}, {\rm{R4}}), ({\rm{R2}}, {\rm{R5}}):}} $ $ {\underline{({\rm{R2}}, {\rm{R6}}), ({\rm{R3}}, {\rm{R6}}):}} $ $ F_i=F_j=\emptyset $ $ F_i $ $ F_j $ $ {\underline{({\rm{R3}}, {\rm{R4}}):}} $ $ \delta_j\in S $ $ S\in V_i\cup F_i $ $ V_i=F_i $ $ \phi_3(V_i)=\{S\setminus\{\delta_j\}\mid S\in V_i\} {\; \; \text{and}\; \; } \phi_3(F_i)=\{S\setminus\{\delta_j\}\mid S\in F_i\}. $ Because
$ V_i=F_i $ $ \phi_3(V_i)=\phi_3(F_i) $ $ \phi_4(\phi_3(V_i))=\emptyset=\phi_4(\phi_3(F_i)). $ Applying R4 first directly leads to
$ \phi_4(V_i)=\emptyset=\phi_4(F_i) $ $ {\underline{({\rm{R3}}, {\rm{R5}}):}} $ $ \delta_j\in S $ $ S\in V_i\cup F_i $ $ {\cal{D}}\subseteq 2^\Delta $ $ T,T'\subseteq \Delta $ $ V_i=\{R{\dot \cup} T\mid R\in{\cal{D}}\} $ $ F_i=\{R{\dot \cup} T'\mid R\in{\cal{D}}\} $ $ \phi_3(V_i)=\{R{\dot \cup} \hat{T}\mid R\in\hat{{\cal{D}}}\} $ $ \phi_3(F_i)=\{R{\dot \cup} \hat{T}'\mid R\in\hat{{\cal{D}}}\} $ $ \hat{{\cal{D}}}\subseteq 2^{\Delta\setminus\{\delta_j\}} $ $ \hat{T},\hat{T}'\subseteq\Delta\setminus\{\delta_j\} $ $ \phi_5(\phi_3(V_i))=\hat{T} {\; \; \text{and}\; \; } \phi_5(\phi_3(F_i))=\hat{T'}. $ Applying R3 and R5 in reversed order leads to the same results:
$ \phi_3(\phi_5(V_i))=\phi_3(T)=\hat{T} {\; \; \text{and}\; \; } \phi_3(\phi_5(F_i))=\phi_3(T')=\hat{T}'. $ $ {\underline{({\rm{R4}}, {\rm{R5}}):}} $ $ V_i=F_i $ $ {\cal{D}}\subseteq 2^\Delta $ $ T,T'\subseteq \Delta $ $ V_i=\{S{\dot \cup} T\mid S\in {\cal{D}}\} $ $ F_i=\{S{\dot \cup} T'\mid S\in {\cal{D}}\} $ $ T=T' $ $ \phi_5(\phi_4(V_i))=\phi_5(\emptyset)=\emptyset {\; \; \text{and}\; \; } \phi_5(\phi_4(F_i))=\phi_5(\emptyset)=\emptyset. $ On the other hand,
$ \phi_4(\phi_5(V_i))=\phi_4(T) {\; \; \text{and}\; \; } \phi_4(\phi_5(F_i))=\phi_4(T')=\phi_4(T). $ Thus, because
$ \phi_4(\phi_5(V_i))=\phi_4(\phi_5(F_i)), $ $ \phi_4(\phi_5(V_i))=\phi_4(\phi_5(F_i))=\emptyset $ $ {\underline{({\rm{R4}}, {\rm{R6}}):}} $ $ V_i=F_i $ $ F_i=F_j=\emptyset $ $ V_i=\emptyset $ $ \{\delta_j\}\in V_i $ $ {\underline{({\rm{R5}}, {\rm{R6}}):}} $ $ F_i=F_j=\emptyset $ $ V_i $ $ F_i $ $ V_i=\emptyset $ $ \{\delta_j\}\in V_i $ □ We give an example of applying the transformation rules R1–R6.
Example 3. We recall
$ \Delta_{\mathrm{ex}} $ $ \hat{V}_i $ $ \hat{F}_i $ $ {\mathrm{CSP}}^\wedge(\Delta_{\mathrm{ex}}) $ $ \begin{array}{*{20}{l}} {{{\hat C}_1}:\quad {\eta _1} \gt \min \{ {\eta _3}\} }&{ - \min \{ {\eta _2}\} \;\;\;\;\;}&{ = {\eta _3} - {\eta _2},}\\ {{{\hat C}_2}:\quad {\eta _2} \gt \min \{ 0\} }&{ - \min \{ {\eta _1}\} }&{ = - {\eta _1},}\\ {{{\hat C}_3}:\quad {\eta _3} \gt \min \{ 0\} }&{ - \min \{ 0\} }&{ = 0,}\\ {{{\hat C}_4}:\quad {\eta _4} \gt \min \{ {\eta _3} + {\eta _5}\} }&{ - \min \{ 0\} }&{ = {\eta _3} + {\eta _5},}\\ {{{\hat C}_5}:\quad {\eta _5} \gt \min \{ 0\} }&{ - \min \{ 0\} }&{ = 0.} \end{array} $ Note that because a belief base
$ \Delta $ $ \Delta $ $ \Delta $ $ {\mathrm{CSP}}^\wedge(\Delta) $ 2.6. Inductive inference
-
Once a ranking model
$ \kappa $ $ \Delta $ $ |\!\!\!\sim_\kappa $ $ B $ $ \kappa $ $ A $ $ A |\!\!\!\sim _\kappa B {\; \; {\; \; \text{iff}\; \; }\; \; } \kappa(A) = \infty {\; \; \text{or}\; \; } \kappa(AB) \lt \kappa(A{\overline B }). $ (5) Compared with this, inductive inference is the task of drawing inferences right from the belief base
$ \Delta $ $ \kappa $ $ \Delta $ $ |\!\!\!\sim_\kappa $ Definition 1 (Inductive Inference Operator[18]). An inductive inference operator is a mapping
$ {\cal{I}} \colon \Delta \mapsto |\!\!\!\sim ^{\cal{I}}_\Delta $ $ \Delta $ $ |\!\!\!\sim ^{\cal{I}}_\Delta $ $ {\cal{L}}(\Sigma) $ $ {\bf{(DI)}} $ $ (B|A) \in \Delta $ $ A |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ {\bf{(TV)}} $ $ \Delta = \emptyset $ $ A |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ A \models \!\! B $ This leads to the definition
$ \Delta |\!\!\!\sim ^{\cal{I}} (B|A) $ $ A |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ |\!\!\!\sim ^X_\Delta $ $ |\!\!\!\sim ^{{\cal{I}}^X}_\Delta $ ● p-Entailment
$ {\cal{I}}^P \colon \Delta \mapsto |\!\!\!\sim ^P_\Delta $ $ A |\!\!\!\sim ^P_\Delta \!\! B $ $ A |\!\!\!\sim _\kappa \!\! B $ $ \kappa $ $ \Delta $ ● The System Z inference operator
$ {\cal{I}}^Z \colon \Delta \mapsto |\!\!\!\sim ^Z_\Delta $ $ A |\!\!\!\sim ^Z_\Delta \!\! B $ $ A |\!\!\!\sim _{\kappa^Z_\Delta} \!\! B $ $ \kappa^Z_\Delta $ $ \Delta $ ● The skeptical c-inference operator
$ {\cal{I}}^c \colon \Delta \mapsto |\!\!\!\sim ^c_\Delta $ $ A |\!\!\!\sim ^c_\Delta \!\! B $ $ A |\!\!\!\sim _{\kappa^{\vec{\eta}}_\Delta} \!\! B $ $ \kappa^{\vec{\eta}}_\Delta $ $ \Delta $ It is a well-known result that p-entailment is characterized by an axiomatic collection of inference rules called System P[20] which is why we call
$ {\cal{I}}^P $ Definition 2 (System P[20]).Let
$ \Delta $ $ A, B, C \in {\cal{L}}(\Sigma) $ $ {\bf{(REF) }}$ $ A|\!\!\!\sim ^{\cal{I}}_\Delta A $ $ {\bf{(CUT)}} $ $ AB|\!\!\!\sim ^{\cal{I}}_\Delta C $ $ A|\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ A|\!\!\!\sim ^{\cal{I}}_\Delta C $ $ {\bf{(CM)}} $ $ A|\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ A|\!\!\!\sim ^{\cal{I}}_\Delta C $ $ AB |\!\!\!\sim ^{\cal{I}}_\Delta C $ $ {\bf{(RW)}} $ $ A|\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ B\models C $ $ A|\!\!\!\sim ^{\cal{I}}_\Delta C $ $ {\bf{(OR)}} $ $ A |\!\!\!\sim ^{\cal{I}}_\Delta C $ $ B|\!\!\!\sim ^{\cal{I}}_\Delta C $ $ A\lor B |\!\!\!\sim ^{\cal{I}}_\Delta C $ $ {\bf{(LLE)}} $ $ A\equiv B $ $ B|\!\!\!\sim ^{\cal{I}}_\Delta C $ $ A|\!\!\!\sim ^{\cal{I}}_\Delta C $ Further, System P inference satisfies semi-monotony (SM)[21,22], and classic preservation (CP)[23], among others:
$ {\bf{(SM)}} $ $ A |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ \Delta \subseteq \Delta' $ $ A |\!\!\!\sim ^{\cal{I}}_{\Delta'} \!\! B $ $ {\bf{(CP)}} $ $ A |\!\!\!\sim ^{\cal{I}}_\Delta \bot $ $ A |\!\!\!\sim ^P_\Delta \bot $ System P is considered to be the "conservative core" of nonmonotonic reasoning systems[20]. System Z extends System P, most notably, by satisfying rational monotony (RM)[14,24]:
$ {\bf{(RM)}} $ $ A |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ 
$ AC |\!\!\!\sim ^{\cal{I}}_{\Delta} \!\! B $ Both System P and System Z do not satisfy syntax splitting[18,25], though, and suffer from the drowning problem[10,26]. Syntax splitting (SynSplit) requires that inferences depend on relevant parts of the belief base only, known as the property relevance (Rel), and that strengthening antecedents by irrelevant information has no influence on the inferences, called independence (Ind).
Definition 3 (Syntax Splitting[18]). Let
$ \Delta $ $ \{\Sigma_1,\Sigma_2\} $ $ \Sigma $ $ \{\Delta_1,\Delta_2\} $ $ \Delta $ $ i=1,2 $ $ \Delta_i $ $ \Sigma_i $ $ \Sigma(\Delta_i) \subseteq \Sigma_i $ $ {\bf{(Rel) }}$ $ i \in \{1,2\} $ $ A, B \in {\cal{L}}(\Sigma_i) $ $ A |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ A |\!\!\!\sim ^{\cal{I}}_{\Delta_i} \!\! B $ $ {\bf{(Ind)}} $ $ i,j \in \{1,2\} $ $ i \neq j $ $ A, B \in {\cal{L}}(\Sigma_i) $ $ C \in {\cal{L}}(\Sigma_j) $ $ A |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ AC |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ {\bf{(SynSplit)}} $ The drowning problem describes the circumstance when exceptional subclasses do not inherit properties from their superclass although these properties are unrelated to the reason for the exceptionality. For instance, if the belief base
$ \Delta_{\mathrm{bfp}} $ $ (e|b) $ $ \Delta_{\mathrm{bfp}} $ $ (e|p) $ Definition 4 (Safe Splitting[27]). Let
$ \Delta $ $ \Delta_1, \Delta_2 \subseteq \Delta $ $ \Delta $ $ \Delta_1 \cup \Delta_2 = \Delta $ $ \Sigma_3 \subseteq \Sigma $ $ \{\Delta_1,\Delta_2\} $ $ \Delta $ $ \Sigma_3 $ $ \Sigma_1, \Sigma_2 \subseteq \Sigma $ ●
$ \Sigma_1, \Sigma_2, \Sigma_3 $ $ \Sigma $ $ \Sigma = \Sigma_1 \cup \Sigma_2 \cup \Sigma_3 $ ● for
$ i \in \{1,2\} $ $ \Sigma(\Delta_i) \subseteq \Sigma_i \cup \Sigma_3 $ ● (Safeness) for
$ i,j \in \{1,2\} $ $ i \neq j $ $ \omega_i \in \Omega(\Sigma_i) $ $ \omega_3 \in \Omega(\Sigma_3) $ $ \omega_j \in \Omega(\Sigma_j) $ $ \omega_i\omega_j\omega_3 \not \models \bigvee\limits_{(B|A) \in \Delta_j} A {\overline B }. $ (6) We denote such a safe splitting of
$ \Delta $ $ \Delta_1 \bigcup_{\Sigma_1,\Sigma_2}^s \Delta_2 \mid \Sigma_3 $ The safeness property (6) guarantees that partial possible worlds which are defined over the atoms from one subbase
$ \Delta_i $ $ \Delta $ $ \Sigma $ $ \Delta_j $ $ j\neq i $ Definition 5 (Conditional Syntax Splitting[27]).An inductive inference operator
$ {\cal{I}} \colon \Delta \mapsto |\!\!\!\sim ^{\cal{I}}_\Delta $ $ \Delta_1 \bigcup_{\Sigma_1,\Sigma_2}^s \Delta_2 \mid \Sigma_3 $ $ \Delta $ $ i,j \in \{1,2\} $ $ i \neq j $ $ {\bf{(CRel)}} $ $ A, B \in {\cal{L}}(\Sigma_i) $ $ \omega \in \Omega(\Sigma_3) $ $ A\omega |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ A\omega |\!\!\!\sim ^{\cal{I}}_{\Delta_i} \!\! B $ $ {\bf{(CInd) }}$ $ A, B \in {\cal{L}}(\Sigma_i) $ $ C \in {\cal{L}}(\Sigma_j) $ $ \omega \in \Omega(\Sigma_3) $ 
$ A\omega |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ AC\omega |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ {\bf{(CSynSplit)}} $ In contrast to System P and System Z, skeptical c-inference does not suffer from the drowning problem but satisfies syntax splitting[18], and also conditional syntax splitting[28]. Hence, c-representations constitute a powerful basis for defining inductive inference operators. However, skeptical c-inference does not satisfy rational monotony (RM) but only the weaker version weak rational monotony (wRM)[29,30]:
$ {\bf{(wRM)}} $ $ \top |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ 
$ A |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ Inference operators which are defined w.r.t. a single c-representation, similar to the System Z inference operator that is defined w.r.t. the unique System Z ranking model, satisfy (RM), instead[29]. An axiomatic scheme for inductive inference operators selecting a single c-representation per belief base and ensuring satisfaction of conditional syntax splitting is given in the study by Beierle et al.[28], but without presenting a concrete instance. In this paper, we will develop such an inductive inference operator which selects a unique 'best' model per belief base.
A straightforward strategy for selecting a unique c-representation
$ \kappa^{\vec{\eta}}_\Delta $ $ \vec{\eta} $ -
In this section, we define core c-representations as a subclass of c-representations and discuss their connection to tolerance partitions. Therewith, we intertwine the inference strength of c-representations with the layer-wise structure of System Z. The main features of core c-representations are:
● For every consistent belief base
$ \Delta $ $ \Delta $ $ \Delta $ $ \Delta $ $ \Delta $ ● Core c-representations are easier to compute than general c-representations. While the computation of c-representations requires to solve the constraint satisfaction problem
$ {\mathrm{CSP}}(\Delta) $ ● Core c-representations provide a unique minimal ranking model while belief bases have several pareto-minimal c-representations in general, depending on the notion of minimality. Therewith, we obtain a natural model selection strategy for inductive reasoning based on minimal core c-representations.
● As being c-representations, core c-representations inherit many beneficial properties from c-representations including the satisfaction of syntax splitting, and the solution of the drowning problem. Moreover, the inductive inference operator based on minimal core c-representations fully complies with conditional syntax splitting.
The definition of core c-representations is based on a simplification of the constraint satisfaction problem
$ {\mathrm{CSP}}(\Delta) $ Definition 6 (Core c-Representation). Let
$ \Delta $ $ n = |\Delta| $ $ {\mathrm{CSP}}^+(\Delta) = \{\hat{C}_1^+, \ldots, \hat{C}_n^+ \} $ $ \hat{C}^+_i \colon \quad \eta_i \gt \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \}, \qquad i \in [n]. $ (7) If
$ \vec{\eta} \in {\mathbb{N}}_0^n $ $ {\mathrm{CSP}}^+(\Delta) $ $ \kappa^{\vec{\eta},{c}}_{\Delta}(\omega) = \sum\nolimits_{\delta_i \in {\mathrm{fal}}_\Delta(\omega)} \eta_i $ $ \omega \in \Omega(\Sigma), $ $ \Delta $ The constraint (7) corresponds to (4) without the negative part on the right-hand side. That is, like general c-representations, core c-representations penalize possible worlds for falsifying conditionals but put usually 'higher' constraints on the impact vector
$ \vec{\eta} $ Proposition 2. Let
$ \Delta $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ Proof. By definition,
$ \vec{\eta} = (\eta_1, \ldots, \eta_n) $ $ i \in [n] $ $ s_i \in {\mathbb{N}}_0 $ $ \eta_i \gt \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in V_i \} - s_i, \qquad i \in [n], $ holds, too. With
$ s_i = \min \{ \sum\nolimits_{\delta_j \in S} \eta_j \mid S \in F_i \} $ $ \vec{\eta} $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ □ Beyond a numerical simplification of
$ \hat{C}_i $ $ \Delta $ $ \hat{C}_1 $ $ \eta_1 \gt \eta_3 - \eta_2 $ $ \eta_1 + \eta_2 \gt \eta_3 $ $ \hat{C}_1 $ $ \delta_1 $ $ \delta_2 $ $ \hat{C}^+_1 $ $ \eta_1 \gt \eta_3 $ Proposition 3. Let
$ \Delta $ $ n = |\Delta| $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ $ \vec{\eta} $ $ i \in [n] $ $ \eta_i \geq 1 $ Proof. Because
$ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ $ \vec{\eta} $ $ \eta_i \gt \min \{ \sum\nolimits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \} $ $ i \in [n] $ $ \vec{\eta} \in {\mathbb{N}}^n_0 $ $ \sum\nolimits_{\delta_j \in S} \eta_j \geq 0 $ $ S \in \hat{V}_i $ $ i \in [n] $ $ \min \{ \sum\nolimits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i\} \geq 0 $ $ \eta_i \gt 0 $ $ i \in [n] $ □ Because of Proposition 3, core c-representations satisfy the property inductive enforcement (Ind-Enf), while general c-representations violate it (cf.[31]):
${\bf{(Ind-Enf)}} $ $ \omega, \omega' \in \Omega(\Sigma) $ $ {\mathrm{fal}}_\Delta(\omega) \subsetneq {\mathrm{fal}}_\Delta(\omega') $ $ \kappa(\omega) \lt \kappa(\omega') $ Note that we use the reduced constraint inducing sets
$ \hat{V}_i $ $ {\mathrm{CSP}}(\Delta) $ $ \eta_i $ $ V_i $ $ V_i $ $ i\in[n] $ Example 4. We continue Example 3. The constraint satisfaction problem
$ {\mathrm{CSP}}^+(\Delta_{\mathrm{ex}}) $ $ \eta_1 \gt \min \{\eta_3\},\; \; \eta_2 \gt \min \{0\},\; \; \eta_3 \gt \min \{0\},\; \; \eta_4 \gt \min \{\eta_3+\eta_5\},\; \; \eta_5 \gt \min \{0\}, $ and has the unique component-wise minimal solution
$ (2,1,1,3,1) $ $ \delta_5 $ $ \eta_5 \gt \min\{\eta_3\} $ $ C_5 $ $ \eta_5 $ $ \eta_3 $ Core c-representations are closely related to System Z which becomes clear when characterizing tolerance in terms of the constraint inducing sets
$ V_i $ Proposition 4. Let
$ \Delta $ $ {\cal{T}}(\Delta) = (\Delta_1, \ldots, \Delta_m) $ $ \Delta $ $ {\cal{T}}(\Delta) $ $ \Delta $ $ k \in [m] $ $ \delta_i \in \Delta_k $ $ S \in V_i $ $ S \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ $ \delta_i $ $ \Delta $ $ \emptyset \in V_i $ Proof. Let
$ {\cal{T}}(\Delta) = (\Delta_1,\ldots, \Delta_k) $ $ k \in [m] $ $ \delta_i \in \Delta_k $ $ \omega $ $ \delta_i $ $ \bigcup_{j=k}^m \Delta_j $ $ \omega $ $ \bigcup_{j=1}^{k-1} \Delta_j $ $ S \in V_i $ $ S \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ The other way round, the existence of
$ S \in V_i $ $ S \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ $ \omega $ $ \delta_i $ $ \bigcup_{j=k}^{m} \Delta_j $ $ k \in [m] $ $ \delta_i \in \Delta_k $ $ {\cal{T}}(\Delta) $ $ \Delta $ In the special case where
$ \delta_i $ $ \Delta $ $ \delta_i $ $ \Delta $ $ \emptyset \in V_i $ $ S \subseteq \bigcup_{j=1}^{0} \Delta_j = \emptyset $ $ S = \emptyset $ □ Analog to the constellation in Proposition 4, we can define generalized tolerance partitions by replacing
$ V_i $ $ \hat{V}_i $ Definition 7 (Generalized Tolerance Partition). Let
$ \Delta $ $ (\Delta_1, \ldots, \Delta_m) $ $ \Delta $ $ \Delta $ $ k \in [m] $ $ \delta_i \in \Delta_k $ $ S \in \hat{V}_i $ $ S \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ $ \hat{V}_i = \{\emptyset\} $ $ \delta_i $ $ \Delta $ Tolerance partitions constitute a proper subclass of generalized tolerance partitions, as the next proposition shows. As a consequence, generalized tolerance partitions of consistent belief bases always exist.
Proposition 5. Let
$ \Delta $ $ {\cal{T}}(\Delta) $ $ \Delta $ $ {\cal{T}}(\Delta) $ $ \Delta $ Proof. Let
$ {\cal{T}}(\Delta) = (\Delta_1, \ldots, \Delta_m) $ $ \Delta $ $ {\cal{T}}(\Delta) $ $ \Delta $ $ k \in [m] $ $ \delta_i \in \Delta_k $ $ S \in V_i $ $ S \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ $ S' \in \hat{V}_i $ $ S' \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ $ V_i $ If R1 removes
$ S $ $ S \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ $ V_i $ $ S' $ $ S $ $ V_i $ $ S' $ $ S' \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ $ V_i $ $ S $ $ S $ $ S $ $ V_i $ $ \emptyset $ $ \emptyset \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ $ i,l \in [n] $ $ i \neq l $ $ F_i = F_l = {\emptyset} $ $ {\cal{D}} \subseteq 2^\Delta $ $ V_i = {\cal{D}} {\dot \cup} \{\{\delta_l\}\} $ $ V_l = {\cal{D}} {\dot \cup} \{\{\delta_i\}\} $ $ S = \{\delta_l\} $ $ S $ $ V_i $ $ S $ $ V_i $ $ S' \in {\cal{D}} $ $ S' \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ $ \delta_i \in \bigcup_{j=1}^{k-1} \Delta_j $ $ \delta_i \in \Delta_k $ $ \delta_l \in \Delta_j $ $ j \gt k $ $ \{\delta_l\} = S \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ The fact that there is a generalized tolerance partition which is not a tolerance partition is proven by the following Example 5.
□ Example 5. We continue Example 4. The ordered partition
$ {\cal{T}}(\Delta_{\mathrm{ex}}) = (\Delta_1,\Delta_2) $ $ \Delta_{\mathrm{ex}} $ $ \Delta_1 = \{\delta_2, \delta_3, \delta_5\} $ $ \Delta_2 = \{\delta_1, \delta_4\} $ $ \Delta_{\mathrm{ex}} $ $ \hat{V}_i = \{\emptyset\} $ $ i \in \{2,3,5\} $ $ \{\delta_3\} \in \hat{V}_1 \cap 2^{\Delta_1} $ $ \{\delta_3, \delta_5\} \in \hat{V}_4 \cap 2^{\Delta_1} $ $ {\cal{T}}(\Delta_{\mathrm{ex}}) $ $ \Delta $ $ \delta_5 $ $ \Delta $ $ \delta_5 = ({\overline c }|ab) $ $ \delta_3 = ({\overline a }|b \lor c) $ $ \delta_5 $ $ \Delta $ Generalized tolerance partitions help focus on relevant dependencies among the conditionals in
$ \Delta $ $ \delta_3 $ $ \delta_5 $ $ \delta_5 $ $ \Delta $ Based on the notion of generalized tolerance partitions and the next lemma, we can formulate a construction method for core c-representations.
Lemma 1. Let
$ \Delta $ $ n = |\Delta| $ $ i \in [n] $ $ \hat{V}_i = \{\emptyset\} $ Proof. Because
$ \Delta $ $ \delta_i \in \Delta $ $ \Delta $ $ \Delta $ $ \Delta $ $ \emptyset \in V_i $ $ \hat{V}_i = \{\emptyset\} $ □ The crucial point of the construction method for core c-representations is that the impact factors of conditionals in the
$ i $ $ \Delta $ Definition 8 (Base Function). Let
$ {\cal{T}}(\Delta) = (\Delta_1, \ldots, \Delta_m) $ $ \Delta $ $ n = |\Delta| $ $ \vec{\eta} \in {\mathbb{N}}^n $ $ \phi^{\vec{\eta}}_{{\cal{T}}(\Delta)} \colon \Delta \to {\mathbb{N}}_0 $ $ \vec{\eta} $ $ {\cal{T}}(\Delta) $ $ \phi_{{\cal{T}}(\Delta)}^{\vec{\eta}}(\delta_i) = \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \colon S \subseteq \bigcup\limits_{j=1}^{k-1} \Delta_j \}, \qquad i \in [n], $ (8) where,
$ k $ $ \Delta_k \in {\cal{T}}(\Delta) $ $ \delta_i \in \Delta_k $ Base functions transfer the idea of Z-ranks from System Z to c-representations and arbitrary generalized tolerance partitions. The expression in (8) is the right-hand side of (7) where the sums in the min-term are restricted to cover conditionals from
$ \bigcup_{j=1}^{k-1} \Delta_j $ $ \Delta $ Proposition 6. Let
$ \Delta $ $ n = |\Delta| $ $ {\cal{T}} (\Delta) = (\Delta_1, \ldots, \Delta_m) $ $ \Delta $ $ \vec{\eta} \in {\mathbb{N}}^n $ $ \eta_i \gt \phi_{{\cal{T}}(\Delta)}^{\vec{\eta}}(\delta_i), \qquad i \in [n]. $ (9) Then,
$ \kappa(\omega) = \sum\nolimits_{\delta_i \in {\mathrm{fal}}_\Delta(\omega)} \eta_i $ $ \omega \in \Omega(\Sigma) $ $ \Delta $ $ \eta_i = \phi_{{\cal{T}}(\Delta)}^{\vec{\eta}}(\delta_i) + 1 $ $ i \in [n] $ Proof. Because of
$ \{ S \in \hat{V}_i \mid S \subseteq \bigcup_{j=1}^{k-1} \Delta_j \} \subseteq \hat{V}_i $ $ \min N \leq \min N' $ $ N' \subseteq N \subseteq {\mathbb{N}} $ $ \eta_i \gt \phi^{\vec{\eta}}_{{\cal{T}}(\Delta)}(\delta_i) \geq \min\{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \}, \qquad i \in [n], $ which shows that
$ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ □ In Proposition 9 we will show that for every core c-representation
$ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ $ {\cal{T}}(\Delta) $ $ \vec{\eta} $ $ \phi^{\vec{\eta}}_{{\cal{T}}(\Delta)}(\delta_i) $ $ \vec{\eta} $ $ {\cal{T}}(\Delta) $ $ \delta_i $ Example 6. We continue Example 5 and recall that
$ {\cal{T}}(\Delta_{\mathrm{ex}}) = (\Delta_1,\Delta_2) $ $ \Delta_1 = \{\delta_2, \delta_3, \delta_5\} $ $ \Delta_2 = \{\delta_1, \delta_4\} $ $ \Delta_{\mathrm{ex}} $ $ \Delta_{\mathrm{ex}} $ $ \vec{\eta} = (2,1,1,3,1) $ $ \Delta_1 $ $ \eta_2 = \eta_3 = \eta_5 = 1 \gt 0 $ $ \Delta_2 $ $ \eta_1 = 2 \gt 1 = \eta_3 $ $ \eta_4 = 3 \gt 1 + 1 = \eta_3 + \eta_5 $ We remark that the so-called Z-c-representation from Kern-Isberner[2] fits into the concept of core c-representations.
Definition 9 (Z-c-representation[2]). Let
$ \Delta $ $ n = |\Delta| $ $ \vec{\eta}^{Z,c}_\Delta = (\eta_1, \ldots, \eta_n) \in {\mathbb{N}}^n $ $ \eta_i = \phi^{\vec{\eta}^{Z,c}_\Delta}_{Z(\Delta)}(\delta_i) + 1, \qquad i \in [n], $ (10) where,
$ Z(\Delta) = (\Delta_1, \ldots, \Delta_m) $ $ \Delta $ $ \kappa^{Z,c}_\Delta(\omega) = \sum\nolimits_{\delta_i \in {\mathrm{fal}}_\Delta(\omega)} \eta_i $ $ \omega \in \Omega(\Sigma) $ $ \Delta $ Note that the base function
$ \phi^{\vec{\eta}^{Z,c}_\Delta}_{Z(\Delta)} $ $ \hat{V}_i $ $ i \in [n] $ Proposition 7. For every consistent belief base
$ \Delta $ $ \kappa^{Z,c}_\Delta $ $ \Delta $ $ \kappa^{Z,c}_\Delta $ $ \Delta $ Proof. According to Proposition 5, the Z-partition
$ Z(\Delta) $ $ \Delta $ $ \vec{\eta} \in {\mathbb{N}}^n $ $ \eta_i \gt \phi^{\vec{\eta}}_{Z(\Delta)}(\delta_i), \qquad i \in [n], $ leads to a core c-representation of
$ \Delta $ $ \vec{\eta}^{Z,c}_\Delta \in {\mathbb{N}}^n $ $ \eta_i = \phi^{\vec{\eta}^{Z,c}_\Delta}_{Z(\Delta)}(\delta_i) + 1, \qquad i \in [n], $ which is a unique assignment because
$ Z(\Delta) $ □ The Z-c-representation
$ \kappa^{Z,c}_\Delta $ $ \kappa^Z_\Delta $ $ \kappa^{Z,c}_\Delta $ $ \Delta $ $ \kappa^Z_\Delta $ $ \kappa^{Z,c}_\Delta $ According to Proposition 2, core c-representations of a belief base
$ \Delta $ $ \Delta $ $ \Delta $ $ \Delta $ $ \Delta $ $ \Delta $ $ \Delta $ Proposition 8. Let
$ \Delta $ $ \Delta $ $ \Delta $ Proof. From Proposition 2 we know that core c-representations are c-representations. Because c-representations of
$ \Delta $ $ \Delta $ $ \Delta $ $ \Delta $ $ \kappa^{Z,c}_\Delta $ $ \Delta $ □ Next, we show that consistent belief bases have a unique minimal core c-representation and discuss this specific core c-representation in more detail.
-
The Z-c-representation
$ \kappa^{Z,c}_\Delta $ $ \Delta $ $ \kappa^{Z,c}_\Delta $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ $ \kappa^{\vec{\eta} {\, '} ,c}_\Delta $ $ \Delta $ $ \eta'_i \lt \eta_i $ $ i \in [n] $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \eta_i \leq \eta'_i $ $ i \in [n] $ $ \kappa^{\vec{\eta} {\, '} ,c}_\Delta $ $ \Delta $ $ \vec{\eta} $ $ {\mathrm{CSP}}^+(\Delta) $ $ \kappa^{\vec{\eta},c}_\Delta(\omega) \leq \kappa^{\vec{\eta} {\, '} ,c}_\Delta(\omega) $ $ \vec{\eta} {\, '} $ $ \omega \in \Omega(\Sigma) $ The construction of the minimal core c-representation is based on a specific generalized tolerance partition which we call canonical generalized tolerance partition.
Definition 10 (Canonical Generalized Tolerance Partition w.r.t.
$ \vec{\eta} $ $ \Delta $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ $ {\cal{Q}}_{\vec{\eta}}(\Delta) = (\Delta_1, \ldots, \Delta_m) $ $ \Delta $ $ \vec{\eta} $ $ k \in [m] $ $ \delta_i \in \Delta $ $ \delta_i \in \Delta $ $ \delta_i \in \Delta_k $ $ \delta_i \in \arg \min \{ \phi_{{\cal{Q}}_{\vec{\eta}}(\Delta)}^{\vec{\eta}}(\delta_l) \mid \delta_l \in \Delta \setminus \bigcup\limits_{j=1}^{k-1} \Delta_j \colon \exists S \in \hat{V}_l \; \text{s.t.}\;\; S \subseteq \bigcup\limits_{j=1}^{k-1} \Delta_j \}. $ (11) $ {\cal{Q}}_{\vec{\eta}}(\Delta) $ $ \Delta $ $ \delta_i $ $ \Delta_k $ $ S \in \hat{V}_i $ $ S \subseteq \bigcup_{j=1}^{k-1} \Delta_j $ $ \Delta $ $ {\cal{Q}}_{\vec{\eta}}(\Delta) $ $ \Delta_k $ $ \bigcup_{j=k}^m \Delta_j $ $ \Delta_1 $ $ \Delta $ $ \Delta_1 = \{ \delta_i \in \Delta \mid \hat{V}_i = \{\emptyset\}\}. $ Then, if we assign the minimal impact value
$ \eta_i = 1 $ $ \delta_i \in \Delta_1 $ $ \Delta_2 $ $ \Delta_1 $ $ \Delta_2 = \{ \delta_i \in \Delta \setminus \Delta_1 \mid \exists S \in \hat{V}_i \cap 2^{\Delta_1}\ \forall \delta_j \in \Delta \setminus \Delta_1\ \forall S' \in \hat{V}_j \cap 2^{\Delta_1} \colon |S| \leq |S'| \}. $ Since conditionals in
$ \Delta_3 $ $ \Delta_2 $ $ \Delta_1 $ Example 7. We recall the belief base
$ \Delta_{\mathrm{ex}} = \{ \delta_1, \ldots, \delta_5 \} $ $ \delta_1 = (b|a), \quad \delta_2 = ({\overline a }|{\overline b }), \quad \delta_3 = ({\overline a }|b \lor c), \quad \delta_4 = (a|bc), \quad \delta_5 = ({\overline c }|ab), $ from Example 2 and the fact that
$ \vec{\eta} = (2,1,1,3,1) $ $ \Delta_{\mathrm{ex}} $ $ \delta_2 $ $ \delta_3 $ $ \delta_5 $ $ \Delta_{\mathrm{ex}} $ $ \phi^{\vec{\eta}}_{{\cal{Q}}_{\vec{\eta}}(\Delta_{\mathrm{ex}})}(\delta_i) = 0 $ $ i = 2, 3, 5 $ $ {\cal{Q}}_{\vec{\eta}}(\Delta_{\mathrm{ex}}) $ $ \Delta_1 = \{ \delta_2, \delta_3, \delta_5 \} $ $ \delta_2 $ $ \delta_4 $ $ \Delta_2 $ $ \Delta_{\mathrm{ex}} $ $ {\cal{T}}(\Delta_{\mathrm{ex}}) $ $ \delta_1 $ $ \phi^{\vec{\eta}}_{{\cal{Q}}_{\vec{\eta}}(\Delta_{\mathrm{ex}})}(\delta_1) = \eta_3 = 1 \lt 2 = \eta_3 + \eta_5 = \phi^{\vec{\eta}}_{{\cal{Q}}_{\vec{\eta}}(\Delta_{\mathrm{ex}})}(\delta_4). $ Thus,
$ \Delta_2 = \{ \delta_1 \} $ $ \Delta_3 = \{ \delta_4 \} $ $ {\cal{Q}}_{\vec{\eta}}(\Delta_{\mathrm{ex}}) $ $ {\cal{Q}}_{\vec{\eta}}(\Delta_{\mathrm{ex}}) $ $ {\cal{T}}(\Delta_{\mathrm{ex}}) $ Note that while a canonical generalized tolerance partition is based on an impact vector
$ \vec{\eta} $ $ \Delta_1 $ $ \vec{\eta} $ By using
$ {\cal{Q}}_{\vec{\eta}}(\Delta) $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ $ {\cal{T}}(\Delta) $ $ \Delta $ $ \eta_i \gt \phi^{\vec{\eta}}_{{\cal{T}}(\Delta)}(\delta_i) $ $ i \in [n] $ Proposition 9. Let
$ \Delta $ $ n = |\Delta| $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ $ {\cal{Q}}_{\vec{\eta}}(\Delta) $ $ \Delta $ $ \vec{\eta} $ $ \phi^{\vec{\eta}}_{{\cal{Q}}_{\vec{\eta}}(\Delta)}(\delta_i) = \min\{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \}, \qquad i \in [n], $ i.e., the canonical generalized tolerance partition is able to capture all relevant information for computing
$ \eta_i $ Proof. The essence of the proof is to show for
$ i \in [n] $ $ S' \in \hat{V}_i $ $ S' \not\subseteq \bigcup_{j=1}^{k_i-1} \Delta_j $ $ \sum\limits_{\delta_j \in S'} \eta_j \lt \phi^{\vec{\eta}}_{{\cal{Q}}_{\vec{\eta}}(\Delta)}(\delta_i) $ (12) holds, where
$ k_i $ $ \Delta_{k_i} \in {\cal{Q}}_{\vec{\eta}}(\Delta) $ $ \delta_i \in \Delta_{k_i} $ $ \phi^{\vec{\eta}}_{{\cal{Q}}_{\vec{\eta}}(\Delta)}(\delta_i) = \min \{\sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \}, \qquad i \in [n], $ immediately follows. Hence, we assume that there is
$ i \in [n] $ $ S' \in \hat{V}_i $ $ S' \not\subseteq \bigcup_{j=1}^{k_i-1} \Delta_j $ $ S' $ $ \{ S \in \hat{V}_i \mid S \not\subseteq \bigcup_{j=1}^{k_i-1} \Delta_j\} $ $ \sum\nolimits_{\delta_j \in S'} \eta_j $ $ \delta_l \in S' $ $ \eta_l \leq \sum\limits_{\delta_j \in S'} \eta_j = \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \} \lt \eta_i $ (13) holds then. Further, there is
$ \delta_l \in S' $ $ \delta_l \notin \bigcup_{j=1}^{k_i-1} \Delta_j $ $ S' $ $ \delta_l $ $ k_i $ $ {\underline{{\text{Case 1}}:}} $ $ S \in \hat{V}_l $ $ S \subseteq \bigcup_{j=1}^{k_i-1} \Delta_j $ $ \phi^{\vec{\eta}}_{{\cal{Q}}_{\vec{\eta}}(\Delta)}(\delta_i) \leq \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_l \colon S \subseteq \bigcup\limits_{j=1}^{k_i-1} \Delta_j \} $ (14) must hold, too, in order that
$ \delta_i $ $ \Delta_{k_i} $ $ \delta_i $ $ {\underline{{\text{Case 2}}:}} $ $ S \in \hat{V}_l $ $ S \subseteq \bigcup_{j=1}^{k_i-1} \Delta_j $ In Case 1, because of (13), (12), and (14) (in this order), we have
$ \eta_l \leq \sum\limits_{\delta_j \in S'} \eta_j \lt \phi^{\vec{\eta}}_{{\cal{Q}}_{\vec{\eta}}(\Delta)}(\delta_i) \leq \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_l \colon S \subseteq \bigcup\limits_{j=1}^{k_i-1} \Delta_j \}, $ (15) and, hence, there must be
$ S'' \in \hat{V}_l $ $ S'' \not\subseteq \bigcup_{j=1}^{k_i-1} \Delta_j $ $ \sum\limits_{\delta_j \in S''} \eta_j \lt \eta_l $ (16) holds. Otherwise, condition (7) would not hold for
$ \delta_l $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ $ S'' \in \hat{V}_l $ $ S'' \not\subseteq \bigcup_{j=1}^{k_i-1} \Delta_j $ $ \hat{V}_l $ $ \Delta $ Now, by combining (15) and (16), we obtain the same situation for
$ \delta_l $ $ \delta_i $ $ S'' \in \hat{V}_l $ $ S'' \not\subseteq \bigcup_{j=1}^{k_i-1} \Delta_j $ $ \sum\limits_{\delta_j \in S''} \eta_j \lt \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_l \colon S \subseteq \bigcup\limits_{j=1}^{k_i-1} \Delta_j \} $ holds. With the same argumentation as for
$ \eta_i $ $ \eta_k $ $ \eta_l \gt \eta_k $ $ \eta_i \gt \eta_l $ $ \Delta $ $ \eta_i \gt \eta_l \gt \eta_k \gt \ldots \gt \eta_i $ □ Corollary 1. Let
$ \Delta $ $ n = |\Delta| $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ $ {\cal{Q}}_{\vec{\eta}}(\Delta) $ $ \Delta $ $ \vec{\eta} $ $ \eta_i \gt \phi^{\vec{\eta}}_{{\cal{Q}}_{\vec{\eta}}(\Delta)}(\delta_i), \qquad i \in [n]. $ Proof. According to (7) and Proposition 9, we have
$ \eta_i \gt \min \{\sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \} = \phi^{\vec{\eta}}_{{\cal{Q}}_{\vec{\eta}}(\Delta)}(\delta_i) $ for
$ i \in [n] $ □ With regard to Proposition 8, also the following proposition holds.
Proposition 10. Let
$ \Delta $ $ \Delta $ $ \Delta $ Proof. Let
$ \Delta $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \Delta $ $ {\cal{Q}}_{\vec{\eta}}(\Delta) $ $ \Delta $ $ \Delta $ $ \Delta $ □ An important consequence of Proposition 9 is that the computation of an impact factor
$ \eta_i $ $ \eta_j $ $ {\cal{Q}}_{\vec{\eta}}(\Delta) $ $ \Delta $ Definition 11 (Minimal Core c-Representation). Let
$ \Delta $ $ n = |\Delta| $ $ \kappa^{mc}_\Delta(\omega) = \sum\nolimits_{\delta_i \in {\mathrm{fal}}_\Delta(\omega)} \eta_i $ $ \omega \in \Omega(\Sigma) $ $ \vec{\eta}^{\,mc}_\Delta = (\eta_1,\ldots, \eta_n) $ $ {\cal{Q}}^{mc}(\Delta) = {\cal{Q}}_{\vec{\eta}^{\,mc}_\Delta}(\Delta) $ $ \eta_i = \phi_{{\cal{Q}}^{mc}(\Delta)}^{\vec{\eta}^{\,mc}_\Delta}(\delta_i) + 1, \qquad i \in [n], $ the minimal core c-representation of
$ \Delta $ $ \phi^{mc}_\Delta = \phi_{{\cal{Q}}^{mc}(\Delta)}^{\vec{\eta}^{\,mc}_\Delta} $ The canonical generalized tolerance partition
$ {\cal{Q}}^{mc}(\Delta) $ $ \vec{\eta}^{\,mc}_\Delta $ $ {\cal{Q}}^{mc}(\Delta) $ $ k=1 $ $ \delta_i $ $ \Delta $ $ \eta_i = 1 $ $ \phi_{{\cal{Q}}^{mc}(\Delta)}^{\vec{\eta}^{\,mc}_\Delta} $ $ \cup_{j=1}^0 \Delta_j = \emptyset $ $ \delta_i $ $ \phi^{mc}_\Delta(\delta_i) $ $ \Delta_1 $ Table 1. Computation of the canonical generalized tolerance partition ${\cal{Q}}^{mc}(\Delta)$, and the impact vector $\vec{\eta}^{mc}_\Delta$ of a (non-empty) consistent belief base $\Delta$.
Input: (Non-empty) consistent belief base $\Delta$, constraint satisfaction problem ${\mathrm{CSP}}^+(\Delta)$ Output: Canonical generalized tolerance partition ${\cal{Q}}^{mc}(\Delta)$, impact vector $\vec{\eta}^{mc}_\Delta$ 1 $m = 1$ 2 WHILE $\Delta \neq \emptyset$: 3 $\eta_{\min} = 0$ 4 $\Delta' = \emptyset$ 5 FOR $\delta_i \in \Delta$: 6 IF there is $S \in \hat{V}_i$ with $S \subseteq \bigcup_{j=1}^m \Delta_j$: 7 $\eta_i = \min\{ \sum_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \colon S \subseteq \bigcup_{j=1}^m \Delta_j \} + 1$ 8 IF $\eta_{\min} = 0$: 9 $\eta_{min} \leftarrow \eta_i$ 10 $\Delta' \leftarrow \Delta' \cup \{ \delta_i \}$ 11 ELSE IF $\eta_i = \eta_{\min}$: 12 $\Delta' \leftarrow \Delta' \cup \{ \delta_i \}$ 13 ELSE IF $\eta_i \lt \eta_{\min}$: 14 $\eta_{\min} \leftarrow \eta_i$ 15 $\Delta' \leftarrow \{ \delta_i \}$ 16 $\Delta_m \leftarrow \Delta'$ 17 $\Delta \leftarrow \Delta \setminus \Delta_m$ 18 $m \leftarrow m+1$ 19 RETURN ${\cal{Q}}^{mc}(\Delta) = (\Delta_1, \ldots, \Delta_m)$ and $\vec{\eta}^{mc}_\Delta = (\eta_1, \ldots, \eta_n)$ Example 8. We recall
$ \Delta_{\mathrm{ex}} $ $ \kappa^{mc}_{\Delta_{\mathrm{ex}}} $ $ \Delta_{\mathrm{ex}} $ $ \Delta_{\mathrm{ex}} $ $ \delta_2 $ $ \delta_3 $ $ \delta_5 $ $ \Delta_1 = \{ \delta_2, \delta_3, \delta_5 \} $ $ {\cal{Q}}^{mc}(\Delta_{\mathrm{ex}}) $ $ \Delta_1 $ $ \eta_2 = \eta_3 = \eta_5 = 1 $ $ \delta_1 $ $ \delta_4 $ $ \Delta_{\mathrm{ex}} \setminus \Delta_1 $ $ \phi^{mc}_{\Delta_{\mathrm{ex}}} $ $ \delta_1 $ $ \eta_1 \gt \eta_3 = 1 $ $ \delta_4 $ $ \eta_4 \gt \eta_3 + \eta_5 = 2 $ $ \vec{\eta}^{\, mc}_{\Delta_{\mathrm{ex}}} $ $ \Delta_1 $ $ \Delta_2 = \{ \delta_1 \} $ $ \delta_1 $ $ \eta_1 = 2 $ $ \Delta_3 = \{ \delta_4 \} $ $ \eta_4 = 3 $ $ \Delta_{\mathrm{ex}} $ $ \vec{\eta}^{\, mc}_{\Delta_{\mathrm{ex}}} = (2, 1, 1, 3, 1) $ $ \Delta_2 $ $ \Delta_3 $ $ {\cal{Q}}^{mc}(\Delta_{\mathrm{ex}}) $ $ {\cal{T}}(\Delta_{\mathrm{ex}}) $ The core c-representation
$ \kappa^{mc}_\Delta $ $ \Delta $ Proposition 11. Let
$ \Delta $ $ n = |\Delta| $ $ \kappa^{mc}_\Delta $ $ \vec{\eta}^{\,mc}_\Delta = (\eta_1, \ldots, \eta_n) $ $ \Delta $ $ \kappa^{\vec{\eta} {\, '} ,c}_\Delta $ $ \Delta $ $ \eta_i \leq \eta'_i $ $ i \in [n] $ Proof. Let
$ \kappa^{\vec{\eta} {\, '} ,c}_\Delta $ $ \Delta $ $ \vec{\eta}{\,''} \in {\mathbb{N}}^n $ $ {\mathrm{CSP}}^+(\Delta) $ $ \eta_i'' \leq \eta_i' $ $ i \in [n] $ $ \vec{\eta}{\,''} $ $ {\mathrm{CSP}}^+(\Delta) $ $ \eta_i \leq \eta_i'' $ $ i \in [n] $ $ {\cal{Q}}_{\vec{\eta}{\,''}}(\Delta) $ $ \Delta $ $ \vec{\eta}{\,''} $ $ \eta''_i \gt \phi^{\vec{\eta}{\,''}}_{{\cal{Q}}_{\vec{\eta}{\,''}}(\Delta)}(\delta_i) $ $ i \in [n] $ $ \eta''_i = \phi^{\vec{\eta}{\,''}}_{{\cal{Q}}_{\vec{\eta}{\,''}}(\Delta)} + 1, \qquad i \in [n], $ (17) follows. Otherwise,
$ \vec{\eta}{\,''} $ Now, we prove by induction over the index
$ k $ $ {\cal{Q}}_{\vec{\eta}{\,''}}(\Delta) $ $ {\cal{Q}}_{\vec{\eta}{\,''}}(\Delta) = {\cal{Q}}^{mc}(\Delta) $ $ \vec{\eta}^{\,mc}_\Delta $ $ \eta_i = \eta''_i $ $ i \in [n] $ $ \vec{\eta}{\,''} $ $ {\mathrm{CSP}}^+(\Delta) $ $ \vec{\eta}^{\,mc}_\Delta $ $ {\mathrm{CSP}}^+(\Delta) $ $ \kappa^{mc}_\Delta $ $ \Delta $ For the induction, we denote the canonical generalized tolerance partition of
$ \Delta $ $ \vec{\eta}{\,''} $ $ {\cal{Q}}_{\vec{\eta}{\,''}}(\Delta) = (\Delta''_1, \ldots, \Delta''_l) $ $ \vec{\eta}^{\,mc}_\Delta $ $ {\cal{Q}}^{mc}(\Delta) = (\Delta_1, \ldots, \Delta_m) $ $ k = 1 $ $ \Delta''_1 = \{ \delta_i \in \Delta \mid \hat{V}_i = \{ \emptyset \} \} = \Delta_1. $ As a consequence,
$ \eta''_i = 1 = \eta_i $ $ \delta_i \in \Delta''_1 $ $ \Delta''_i = \Delta_i $ $ i \in [k-1] $ $ \eta''_i = \eta_i $ $ \delta_i \in \bigcup_{j = 1}^{k - 1} \Delta_j $ $ \begin{array}{l} \;\;\;\; \delta_i \in \Delta''_k \\ \Leftrightarrow\ \delta_i \in \arg \min \{ \phi^{\vec{\eta}{\,''}}_{{\cal{Q}}_{\vec{\eta}{\,''}}(\Delta)} (\delta_l) \mid \delta_l \in \Delta \setminus \bigcup\limits_{j=1}^{k-1} \Delta''_j \colon \exists S \in \hat{V}_l \; \text{s.t.}\;\; S \subseteq \bigcup\limits_{j=1}^{k-1} \Delta''_j \} \\ \Leftrightarrow\ \delta_i \in \arg \min \{ \min \{ \sum\limits_{\delta_j \in S} \eta''_j \mid S \in \hat{V}_i \colon S \subseteq \bigcup\limits_{j=1}^{k-1} \Delta''_j \} \mid \delta_l \in \Delta \setminus \bigcup\limits_{j=1}^{k-1} \Delta''_j \colon \exists S \in \hat{V}_l \; \text{s.t.}\;\; S \subseteq \bigcup\limits_{j=1}^{k-1} \Delta''_j \} \\ \Leftrightarrow\ \delta_i \in \arg \min \{ \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \colon S \subseteq \bigcup\limits_{j=1}^{k-1} \Delta_j \} \mid \delta_l \in \Delta \setminus \bigcup\limits_{j=1}^{k-1} \Delta_j \colon \exists S \in \hat{V}_l \; \text{s.t.}\;\; S \subseteq \bigcup\limits_{j=1}^{k-1} \Delta_j \} \\ \Leftrightarrow\ \delta_i \in \arg \min \{ \phi^{mc}_\Delta(\delta_l) \mid \delta_l \in \Delta \setminus \bigcup\limits_{j=1}^{k-1} \Delta_j \colon \exists S \in \hat{V}_l \; \text{s.t.}\;\; S \subseteq \bigcup\limits_{j=1}^{k-1} \Delta_j \} \\ \Leftrightarrow\ \delta_i \in \Delta_k. \end{array} $ Hence,
$ \Delta''_k = \Delta_k $ □ From the uniqueness of the minimal core c-representation it follows that essentially the same belief bases have the same minimal core c-representation. With 'essentially the same', we mean that the belief bases are pairwise equivalent.
Definition 12 (Pairwise Equivalent Belief Bases). Two belief bases
$ \Delta $ $ \Delta' $ $ \beta \colon \Delta \to \Delta' $ $ \beta(\delta) \equiv \delta $ $ \delta \in \Delta $ Recall that in this article we assume that a belief base does not contain equivalent duplicates of conditionals, avoiding that
$ \Delta $ $ (B|A) $ $ (B|A \lor A) $ $ (AB|A) $ Proposition 12. Let
$ \Delta $ $ \Delta' $ $ \kappa^{mc}_\Delta(\omega) = \kappa^{mc}_{\Delta'}(\omega) $ for all
$ \omega \in \Omega(\Sigma) $ Proof. Because
$ \Delta $ $ \Delta' $ $ \beta \colon \Delta \to \Delta' $ $ \beta(\delta) \equiv \delta $ $ \delta \in \Delta $ $ {\mathrm{ver}}(\beta(\delta)) = {\mathrm{ver}}(\delta) $ $ \delta \in \Delta $ $ {\mathrm{fal}}(\beta(\delta)) = {\mathrm{fal}}(\delta) $ $ (B|A) \equiv (D|C) $ $ A \equiv C $ $ AB \equiv CD $ $ A{\overline B } \equiv C{\overline D } $ $ {\mathrm{CSP}}(\Delta) = {\mathrm{CSP}}(\Delta') $ □ The next example shows that the minimal core c-representation is different from the Z-c-representation in general.
Example 9. We consider the belief base
$ \Delta_{{\mathrm{ex}}2} = \{ \delta_1, \ldots, \delta_5 \} $ $ \delta_1 = (c|a), \; \; \delta_2 = (ab{\overline c }|ab{\overline c } \lor a{\overline b }c \lor {\overline a \overline b }{\overline c }), \; \; \delta_3 = (a|{\overline b }{\overline c }), \; \; \delta_4 = (a|{\overline b }c), \; \; \delta_5 = ({\overline b }|{\overline a }). $ The sets
$ {\mathrm{ver}}_{\Delta_{{\mathrm{ex}}2}}(\omega) $ $ {\mathrm{fal}}_{\Delta_{{\mathrm{ex}}2}}(\omega) $ $ {\mathrm{CSP}}^+(\Delta_{{\mathrm{ex}}2}) $ Table 3. Verified and falsified conditionals from $ \Delta_{{\mathrm{ex}}2} $ in Example 9.
$ \omega $ $ {\mathrm{ver}}_{\Delta_{{\mathrm{ex}}2}}(\omega) $ $ {\mathrm{fal}}_{\Delta_{{\mathrm{ex}}2}}(\omega) $ $ \omega $ $ {\mathrm{ver}}_{\Delta_{{\mathrm{ex}}2}}(\omega) $ $ {\mathrm{fal}}_{\Delta_{{\mathrm{ex}}2}}(\omega) $ $ abc $ $ \{\delta_1\} $ $ \emptyset $ $ {\overline a b}c $ $ \emptyset $ $ \{\delta_5\} $ $ ab{\overline c } $ $ \{\delta_2\} $ $ \{\delta_1\} $ $ {\overline a b}{\overline c } $ $ \emptyset $ $ \{\delta_5\} $ $ a{\overline b }c $ $ \{\delta_1,\delta_4\} $ $ \{\delta_2\} $ $ {\overline a \overline b }c $ $ \{\delta_5\} $ $ \{\delta_4\} $ $ a{\overline b }{\overline c } $ $ \{\delta_3\} $ $ \{\delta_1\} $ $ {\overline a \overline b }{\overline c } $ $ \{\delta_5\} $ $ \{\delta_2,\delta_3\} $ $ \eta_1 \gt \min\{0\}, \quad \eta_2,\eta_3 \gt \min\{\eta_1\}, \quad \eta_4 \gt \min\{\eta_2\}, \quad \eta_5 \gt \min\{\eta_2+\eta_3,\eta_4\}. $ While the Z-partition of
$ \Delta_{{\mathrm{ex}}2} $ $ Z(\Delta_{{\mathrm{ex}}2}) = ( \{ \delta_1 \}, \{ \delta_2, \delta_3 \}, \{ \delta_4, \delta_5 \} ) $ and, hence, the impact vector of the Z-c-representation of
$ \Delta_{{\mathrm{ex}}2} $ $ \vec{\eta}^{\,Z,c}_{\Delta_{{\mathrm{ex}}2}} = (1,2,2,3,5) $ $ {\cal{Q}}^{mc}(\Delta_{{\mathrm{ex}}2}) = ( \{ \delta_1 \}, \{ \delta_2, \delta_3 \}, \{ \delta_4 \}, \{ \delta_5 \} ), $ and the minimal core c-representation
$ \kappa^{mc}_{\Delta_{{\mathrm{ex}}2}} $ $ \Delta_{{\mathrm{ex}}2} $ $ \vec{\eta}^{\,mc}_{\Delta_{{\mathrm{ex}}2}} = (1,2,2,3,4) $ $ \delta_4 $ $ \delta_5 $ $ Z(\Delta_{{\mathrm{ex}}2}) $ $ \eta_5 $ $ \eta_5 \gt \eta_2 + \eta_3 $ $ \eta_5 \gt \min \{\eta_2 + \eta_3, \eta_4\} $ $ \eta_4 $ $ \eta_5 $ $ \delta_4 $ $ \delta_5 $ $ \eta_4 $ $ \eta_5 $ $ \eta_5 $ $ \eta_5 \gt \eta_4 $ $ \eta_5 $ $ \Delta_{{\mathrm{ex}}2} $ $ (Z(\delta_1), \ldots, Z(\delta_5)) = (1,2,2,3,3) $ $ \kappa^{mc}_{\Delta_{{\mathrm{ex}}2}} $ Eventually, we note that
$ {\cal{Q}}^{mc}(\Delta) $ $ \Delta $ $ \Delta $ Proposition 13. Let
$ \Delta $ $ n = |\Delta| $ $ \kappa^{mc}_\Delta $ $ \Delta $ $ \vec{\eta}^{\,mc}_\Delta = (\eta_1, \ldots, \eta_n) $ $ {\cal{Q}}^{mc}(\Delta) = (\Delta_1, \ldots, \Delta_m) $ $ \delta_i \in \Delta_k $ $ \delta_j \in \Delta_l $ $ k,l \in [m] $ $ k=l $ $ \eta_i = \eta_j $ $ k \lt l $ $ \eta_i \lt \eta_j $ Proof. Let
$ k=l $ $ \eta_i = \eta_j $ $ l = k + 1 $ $ \eta_j \in \Delta_{k+1} $ $ S' \in \hat{V}_j $ $ S' \subseteq \bigcup_{h=1}^{k} \Delta_h $ $ \sum\limits_{\delta_h \in S'} \eta_h = \min \{ \sum\limits_{\delta_h \in S} \eta_h \mid S \in \hat{V}_j \}. $ If
$ S' \subseteq \bigcup_{h=1}^{k-1} \Delta_h $ $ \phi^{mc}_\Delta(\delta_i) \lt \sum\nolimits_{\delta_h \in S'} \eta_h $ $ \delta_j $ $ \Delta_k $ $ \eta_i = \phi^{mc}_\Delta(\delta_i) + 1 \leq \sum\limits_{\delta_h \in S'} \eta_h = \min \{ \sum\limits_{\delta_h \in S} \eta_h \mid S \in \hat{V}_j \} \lt \eta_j $ in this case. If
$ S' \not\subseteq \bigcup_{h=1}^{k-1} \Delta_h $ $ \delta_g \in S' \cap \Delta_k $ $ \eta_i = \eta_g \leq \sum\limits_{\delta_h \in S'} \eta_h = \min \{ \sum\limits_{\delta_h \in S} \eta_h \mid S \in \hat{V}_j \} \lt \eta_j. $ Hence, in both cases
$ \eta_i \lt \eta_j $ $ k \lt l $ $ s \in {\mathbb{N}} $ $ l = k + s $ $ p \in \{0, 1, \ldots, s\} $ $ \delta_{l_{k+p}} \in \Delta_{k+p} $ $ \eta_i = \eta_{l_{k+0}} \lt \eta_{l_{k+1}} \lt \ldots \lt \eta_{l_{k+s}} = \eta_j $ follows.
□ In the next section we use the minimal core c-representation to define a novel inductive inference operation which we call c-core closure.
-
We define an inference operator which selects for each consistent belief base
$ \Delta $ $ \kappa^{mc}_\Delta $ Definition 13 (c-Core Closure). Let
$ \Delta $ $ A, B \in {\cal{L}}(\Sigma) $ $ {\cal{I}}^{mc} \colon \Delta \mapsto |\!\!\!\sim ^{mc}_\Delta $ $ A |\!\!\!\sim ^{mc}_\Delta \!\! B $ $ A |\!\!\!\sim _{\kappa^{mc}_\Delta} \!\! B $ $ \kappa^{mc}_\Delta $ $ \Delta $ c-Core closure inherits several inference properties that hold for arbitrary ranking models, such as the satisfaction of System P and (RM). Moreover, like skeptical c-inference, c-core closure fully complies with syntax splitting[18], and also with conditional syntax splitting[28], and thus does not suffer from the drowning problem[27]. We prove this by showing that selecting minimal core c-representations for drawing inferences yields a so-called impact preserving selection strategy.
Definition 14 (Selection Strategy for c-Representations[18]). A selection strategy is a mapping
$ \sigma \colon \Delta \mapsto \vec{\eta} $ $ \vec{\eta} \in {\mathbb{N}}_0^n $ $ \Delta $ $ \vec{\eta} $ $ {\mathrm{CSP}}(\Delta) $ In general, selection strategies can assign impact vectors
$ \vec{\eta} $ $ \Delta $ Definition 15 (Impact Preserving Selection Strategy[28]). A selection strategy
$ \sigma $ $ \Delta $ $ \Delta_1 \bigcup_{\Sigma_1,\Sigma_2}^s \Delta_2 \mid \Sigma_3 $ $ \Delta $ $ \sigma(\Delta_i) = \sigma(\Delta)|_{\Delta_i} $ $ i \in \{1,2\} $ We say that an inductive inference operator
$ {\cal{I}} \colon \Delta \mapsto |\!\!\!\sim ^{\cal{I}}_\Delta $ $ \sigma $ $ |\!\!\!\sim ^{\cal{I}}_\Delta = |\!\!\!\sim _{\kappa^{\sigma(\Delta)}_\Delta} $ $ \Delta $ $ \kappa^{\sigma(\Delta)}_\Delta $ $ \Delta $ $ \sigma(\Delta) $ Proposition 14. The inductive inference operator
$ {\cal{I}}^{mc} $ Proof. Let
$ \Delta $ $ \Delta_1 \bigcup_{\Sigma_1,\Sigma_2}^s \Delta_2 \mid \Sigma_3 $ $ \Delta $ $ \sigma(\Delta_1) = \sigma(\Delta)|_{\Delta_1} $ $ \sigma $ $ \Delta' $ $ \vec{\eta}^{\,mc}_{\Delta'} $ $ \Delta' $ For conditionals
$ \delta_i \in \Delta_1 $ $ V_i $ $ F_i $ $ \delta_i $ $ \Delta $ $ \tilde{V}_i $ $ \tilde{F}_i $ $ \delta_i $ $ \Delta_1 $ $ \hat{V}_i = \hat{\tilde{V}}_i $ $ S \in V_i $ $ S' \in V_i $ $ S' \subseteq S $ $ S' \cap \Delta_2 = \emptyset $ $ S \in V_i $ $ \omega \in \Omega(\Sigma) $ $ \omega \in {\mathrm{ver}}(\delta_i) $ $ {\mathrm{fal}}_\Delta(\omega)=S $ $ \omega|_{\Sigma_1\cap\Sigma_3} = \bigwedge\limits_{a \in \Sigma_1 \cap \Sigma_3\colon \omega \models a} a \land \bigwedge\limits_{a \in \Sigma_1 \cap \Sigma_3 \colon \omega \not\models a} {\overline a } $ of
$ \omega $ $ \Sigma_1 \cap \Sigma_3 $ $ \delta_i $ $ \Sigma_1 \cap \Sigma_3 $ $ \omega|_{\Sigma_1\cap\Sigma_3} $ $ \omega' \in \Omega(\Sigma) $ $ \omega' \models \omega|_{\Sigma_1 \cap \Sigma_3} $ $ {\mathrm{fal}}_{\Delta_2}(\omega') = \emptyset $ $ \omega' \in \Omega(\Sigma) $ $ \omega' \in {\mathrm{ver}}(\delta_i) $ $ {\mathrm{fal}}_\Delta(\omega') \subseteq \Delta_1 $ $ S' $ Analogously, for every
$ S \in F_i $ $ S' \in F_i $ $ S' \subseteq S $ $ S' \cap \Delta_2 = \emptyset $ $ V_i $ $ F_i $ $ S \in V_i $ $ S \in F_i $ $ V_i $ $ F_i $ $ S \cap \Delta_2 \neq \emptyset $ $ V'_i = \{ S \in V_i \mid S \subseteq \Delta_1 \}, \qquad F'_i = \{ S \in F_i \mid S \subseteq \Delta_1 \}. $ Because the result of the exhaustive application of R1–R6 to the sets
$ V_i $ $ F_i $ $ \delta_i \in \Delta $ $ \hat{V}_i $ $ \hat{F}_i $ $ \hat{V}'_i = \hat{V}_i, \qquad \hat{F}'_i = \hat{F}_i $ for all
$ \delta_i \in \Delta_1 $ $ V'_i = \tilde{V}_i $ $ F'_i = \tilde{F}_i $ $ \hat{V}_i = \hat{\tilde{V}}_i $ $ V'_i = \tilde{V}_i $ $ F'_i = \tilde{F}_i $ $ \omega \in \Omega(\Sigma) $ $ S \in \tilde{V}_i $ $ \Sigma_1 \cap \Sigma_3 $ $ \delta_i $ $ \Delta_2 $ $ \tilde{V}_i \subseteq V'_i $ $ V'_i \subseteq \tilde{V}_i $ $ V'_i $ $ F'_i = \tilde{F}_i $ If we denote the constraint inducing sets of
$ \delta_i \in \Delta_2 $ $ \tilde{V_i} $ $ \tilde{F_i} $ $ \delta_i $ $ \hat{V}_i = \hat{\tilde{V}}_i $ $ \delta_i \in \Delta $ $ {\mathrm{CSP}}^+(\Delta) = {\mathrm{CSP}}^+(\Delta_1) \cup {\mathrm{CSP}}^+(\Delta_2) $ follows, where the constraints from
$ {\mathrm{CSP}}^+(\Delta_1) $ $ \Delta_2 $ Now, for
$ \delta_i \in \Delta $ $ \eta_i $ $ \Delta $ $ \delta_i \in \Delta_1 $ $ \tilde{\eta}_i $ $ \Delta_1 $ $ \eta_i = \tilde{\eta}_i $ $ \begin{array}{l} \eta_i = \phi^{\vec{\eta}^{\,mc}_\Delta}_{{\cal{Q}}^{mc}(\Delta)}(\delta_i) + 1 = \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{V}_i \} + 1 \\ \;\;\;\; = \min \{ \sum\limits_{\delta_j \in S} \eta_j \mid S \in \hat{\tilde{V}}_i \} + 1 = \phi^{\vec{\eta}^{\,mc}_{\Delta_1}}_{{\cal{Q}}^{mc}(\Delta_1)}(\delta_i) + 1 = \tilde{\eta}_i. \end{array} $ Thus,
$ \sigma(\Delta)|_{\Delta_1} = \sigma(\Delta_1) $ $ \Delta_1 $ $ \Delta_2 $ $ \sigma(\Delta_2) = \sigma(\Delta)|_{\Delta_2} $ □ In contrast to c-core closure and skeptical c-inference, System P and System Z inference do not satisfy (CSynSplit) but only (CRel).
Proposition 15. The inductive inference operators
$ {\cal{I}}^P $ $ {\cal{I}}^Z $ Proof. Because
$ {\cal{I}}^P $ $ {\cal{I}}^Z $ The proof that
$ {\cal{I}}^P $ $ {\cal{I}}^P $ $ \Delta_1 \bigcup^s_{\Sigma_1, \Sigma_2} \Delta_2 \mid \Sigma_3 $ $ \Delta $ $ \Delta $ $ \Delta_1 $ $ \Delta_2 $ $ \Delta $ $ \Delta_1 $ $ \Delta_2 $ $ \Delta_1 $ $ \Delta_2 $ $ \Delta'_1 = \Delta_1 \setminus \Delta_2 $ $ \Delta'_2 = \Delta_2 \setminus \Delta_1 $ $ \Delta'_3 = \Delta_1 \cap \Delta_2 $ $ \kappa^{\vec{\eta}_1}_{\Delta'_1} $ $ \kappa^{\vec{\eta}_2}_{\Delta'_2} $ $ \kappa^{\vec{\eta}_3}_{\Delta'_3} $ $ \Delta'_1 $ $ \Delta'_2 $ $ \Delta'_3 $ $ \kappa^{(\vec{\eta}_1, \vec{\eta}_2, \vec{\eta}_3)}_{\Delta} $ $ \Delta $ $ i \in \{1,2\} $ $ A,B \in {\cal{L}}(\Sigma_i) $ $ \omega \in \Omega(\Sigma_3) $ $ A \omega |\!\!\!\sim ^P_\Delta \!\! B $ $ \Delta \cup \{({\overline B }|A\omega)\} $ $ \Delta_i \cup \{({\overline B }|A\omega)\} $ $ ({\overline B }|A\omega) $ $ \Delta_j $ $ j \in \{1,2\} $ $ j \neq i $ $ A\omega |\!\!\!\sim ^P_\Delta \!\! B $ $ A\omega |\!\!\!\sim ^P_{\Delta_i} \!\! B $ Also the proof that
$ {\cal{I}}^Z $ $ {\cal{I}}^Z $ $ \delta \in \Delta_i $ $ i \in \{1,2\} $ $ \Delta' $ $ \Delta $ $ \Delta' \cap \Delta_i $ $ \omega_i \in \Omega(\Sigma(\Delta_i)) $ $ \omega \in \Omega(\Sigma) $ $ \Delta' \setminus \Delta_i $ $ \Delta $ $ \Delta_1 $ $ \Delta_2 $ $ \delta \in \Delta_1\cap\Delta_2 $ $ \Delta $ $ \Delta_1 $ $ \Delta_2 $ $ \delta \in \Delta_i $ $ Z_\Delta(\delta) = Z_{\Delta_i}(\delta) $ $ i \in \{1,2\} $ $ \kappa^Z_{\Delta_i} = \kappa^Z_\Delta|\Sigma_i $ □ Like System Z and skeptical c-inference, c-core closure violates (SM) (cf. Example 10). With weak semi-monotony (wSM), we propose a novel variant of (SM) which coincides with (SM) for the special case
$ A = \top $ $ {\bf{(wSM)}} $ $ \top |\!\!\!\sim ^{\cal{I}}_\Delta \!\! B $ $ \Delta \subseteq \Delta' $ $ \top |\!\!\!\sim ^{\cal{I}}_{\Delta'} \!\! B $ Proposition 16. Like System P, System Z, and skeptical c-inference, c-core closure satisfies both (CP) (cf. Section 2), and (wSM).
Proof.
$ \underline{({\rm{CP}}):}$ $ {\cal{I}} $ $ {\cal{I}}^Z $ $ {\cal{I}}^c $ $ {\cal{I}}^{mc} $ $ \kappa $ $ \Delta $ $ A |\!\!\!\sim _\kappa \bot $ $ \kappa(\bot) \lt \kappa(A) $ $ \kappa(A) = \infty $ $ \infty = \kappa(\bot) \lt \kappa(A) $ $ A |\!\!\!\sim _\kappa \bot $ $ \kappa(A) = \infty $ $ A $ $ A \equiv \bot $ $ A |\!\!\!\sim _\Delta^X \bot $ $ X \in \{ Z, c, mc\} $ $ A \equiv \bot $ $ \bot |\!\!\!\sim _\kappa \bot $ $ \kappa $ $ \Delta $ $ \kappa(\bot) = \infty $ $ \bot |\!\!\!\sim _\Delta^P \bot $ $ A |\!\!\!\sim _\Delta^P \bot $ $ A |\!\!\!\sim _\Delta^P \bot $ $ \bot |\!\!\!\sim _\kappa A $ $ \kappa $ $ \Delta $ $ \Delta $ $ A |\!\!\!\sim _\Delta^X $ $ X \in \{ Z, c, mc\} $ $ \underline{({\rm{wSM}}):}$ $ {\cal{I}} $ $ {\cal{I}}^Z $ $ {\cal{I}}^c $ $ {\cal{I}}^{mc} $ $ \kappa $ $ \Delta $ $ \top |\!\!\!\sim _\kappa \!\! B $ $ \kappa(B) \lt \kappa({\overline B }) $ $ 0 \lt \kappa({\overline B }) $ $ \omega $ $ {\overline B } $ $ \Delta $ $ \delta_{i_\omega} $ $ \Delta $ $ \Delta' $ $ \kappa^Z_{\Delta'}(\omega) = \max\limits_{\delta \in {\mathrm{fal}}_{\Delta'}(\omega)} Z_{\Delta'}(\delta) \geq Z_{\Delta'}(\delta_{i_\omega}) \geq 1, $ and in case of c-core closure,
$ \kappa^{mc}_{\Delta'}(\omega) = \sum\limits_{\delta_i \in {\mathrm{fal}}_{\Delta'}(\omega)} \eta_i \geq \eta_{i_\omega} \geq 1. $ Hence, in both cases
$ \kappa^X_{\Delta'}({\overline B }) \gt 0 $ $ X \in \{Z, mc\} $ $ \kappa^X_{\Delta'}(B) = 0 $ $ \top |\!\!\!\sim _{\Delta'}^X \!\! B $ $ \eta_{i_\omega} \gt 0 $ $ \omega \in \Omega(\Sigma) $ $ \omega \models {\overline B } $ $ \delta_i \in {\mathrm{fal}}_{\Delta'}(\omega) $ $ \eta_i = 0 $ $ \min\{\sum\limits_{\delta_j \in S} \eta_j \mid S \in F_i\} \gt \min\{\sum\limits_{\delta_j \in S} \eta_j \mid S \in V_i\}. $ However, there is
$ S = {\mathrm{fal}}_{\Delta'}(\omega) \setminus \{\delta_i\} $ $ F_i $ $ \sum\nolimits_{\delta_j \in S} \eta_j = 0 $ $ \min\{\sum\nolimits_{\delta_j \in S} \eta_j \mid S \in F_i\} = 0 $ $ 0 \gt \min\{\sum\limits_{\delta_j \in S} \eta_j \mid S \in V_i\} \geq 0, $ which is a contradiction. Thus,
$ \top |\!\!\!\sim ^c_{\Delta'} \!\! B $ □ Proposition 16 states, among others, that the System Z ranking model and c-representations maintain most plausible beliefs when
$ \Delta $ $ \Delta \subseteq \Delta' $ $ {\mathrm{Bel}}(\kappa^{mc}_{\Delta}) \subseteq {\mathrm{Bel}}(\kappa^{mc}_{\Delta'}) $ Example 10. We consider the belief bases
$ \Delta_{{\mathrm{ex}}3} = \{ \delta_1, \delta_2 \} $ $ \Delta'_{{\mathrm{ex}}3} = \Delta_{{\mathrm{ex}}3} \cup \{ \delta_3 \} $ $ \delta_1 = (b|a), \qquad \delta_2 = (c|b), \qquad \delta_3 = ({\overline c }|a), $ Then (cf. Table 4),
Table 4. Minimal core c-representations of $ \Delta_{{\mathrm{ex}}3} $ and $ \Delta'_{{\mathrm{ex}}3} $ from Example 10.
$ \omega $ $ {\mathrm{ver}}_{\Delta'_{{\mathrm{ex}}3}}(\omega) $ $ {\mathrm{fal}}_{\Delta'_{{\mathrm{ex}}3}}(\omega) $ $ \kappa^{mc}_{\Delta_{{\mathrm{ex}}3}}(\omega) $ $ \kappa^{mc}_{\Delta'_{{\mathrm{ex}}3}}(\omega) $ $ abc $ $ \{\delta_1,\delta_2\} $ $ \{\delta_3\} $ 0 2 $ ab{\overline c } $ $ \{\delta_1,\delta_3\} $ $ \{\delta_2\} $ 1 1 $ a{\overline b }c $ $ \emptyset $ $ \{\delta_1,\delta_3\} $ 1 4 $ a{\overline b }{\overline c } $ $ \{\delta_3\} $ $ \{\delta_1\} $ 1 2 $ {\overline a b}c $ $ \{\delta_2\} $ $ \emptyset $ 0 0 $ {\overline a b}{\overline c } $ $ \emptyset $ $ \{\delta_2\} $ 1 1 $ {\overline a \overline b }c $ $ \emptyset $ $ \emptyset $ 0 0 $ {\overline a \overline b }{\overline c } $ $ \emptyset $ $ \emptyset $ 0 0 $ \begin{array}{l} {\mathrm{CSP}}^+(\Delta_{{\mathrm{ex}}3}) = \{\eta_1 \gt 0,\; \eta_2 \gt 0\}, \\ {\mathrm{CSP}}^+(\Delta'_{{\mathrm{ex}}3}) = \{ \eta_1 \gt \min\{\eta_2, \eta_3\},\; \eta_2 \gt 0,\; \eta_3 \gt \min \{\eta_1, \eta_2\} \}, \end{array} $ so that the minimal core c-representations are given by the impact vectors
$ \vec{\eta}^{\,mc}_{\Delta_{{\mathrm{ex}}3}} = (1,1) $ $ \vec{\eta}^{\,mc}_{\Delta'_{{\mathrm{ex}}3}} = (2,1,2) $ $ a |\!\!\!\sim ^{mc}_{\Delta_{{\mathrm{ex}}3}} c $ $ \kappa^{mc}_{\Delta_{{\mathrm{ex}}3}}(ac) = 0 \lt 1 = \kappa^{mc}_{\Delta_{{\mathrm{ex}}3}}(a{\overline c }) $ 
$ \kappa^{mc}_{\Delta'_{{\mathrm{ex}}3}}(ac) = 2 \gt 1 = \kappa^{mc}_{\Delta_{{\mathrm{ex}}3}}(a{\overline c }) $ $ a |\!\!\!\sim ^{mc}_{\Delta'_{{\mathrm{ex}}3}} {\overline c } $ $ {\cal{I}}^{mc} $ $ {\mathrm{Bel}}(\kappa^{mc}_{\Delta_{{\mathrm{ex}}3}}) = {\mathrm{Cn}}(abc \lor {\overline a }({\overline b }\lor c)) \subseteq {\mathrm{Cn}}({\overline a }({\overline b }\lor c)) = {\mathrm{Bel}}(\kappa^{mc}_{\Delta'_{{\mathrm{ex}}3}}), $ where,
$ {\mathrm{Cn}}(A) $ $ A \in {\cal{L}}(\Sigma) $ Eventually, we note that c-core closure satisfies weak rational monotony (wRM), and also rational monotony (RM) (cf.[29]). This is worth mentioning because it distinguishes c-core closure from skeptical c-inference which satisfies (wRM) but violates (RM).
Proposition 17. c-Core closure satisfies rational monotony (RM) and, therewith, also weak rational monotony (wRM).
Proof. Because each ranking model satisfies (RM)[14], this also holds for
$ \kappa^{mc}_\Delta $ $ {\cal{I}}^{mc} $ □ Note that System P inference does not satisfy (wRM) as the next example shows.
Example 11. Let
$ \Delta_{{\mathrm{ex}}4} = \{(b|\top)\} $ $ \top |\!\!\!\sim ^P_{\Delta_{{\mathrm{ex}}4}} b $ $ \kappa $ $ \Delta_{{\mathrm{ex}}4} $ $ \kappa(ab) = 0, \qquad \kappa(a{\overline b }) = 1, \qquad \kappa({\overline a \overline b }) = 1, \qquad \kappa({\overline a \overline b }) = 2, $ proves that


$ \kappa' $ $ \Delta_{{\mathrm{ex}}4} $ $ \kappa'(ab) = 2, \qquad \kappa'(a{\overline b }) = 1, \qquad \kappa'({\overline a \overline b }) = 1, \qquad \kappa'({\overline a \overline b }) = 0, $ for instance.
Table 5 gives an overview of the inference properties which are satisfied or violated by the inference formalisms mentioned in this article. It shows that c-core closure differs from all the other inference formalisms w.r.t. its properties. We demonstrate this by revisiting the Tweety example from the beginning.
Table 5. Inference properties which are satisfied ($ \checkmark$) or violated (−) by the inductive inference operators mentioned in this paper (System P inference $ {\cal{I}}^P $, System Z inference $ {\cal{I}}^Z $, skeptical c-inference $ {\cal{I}}^c $, and c-core closure $ {\cal{I}}^{mc} $).
$ {\cal{I}}^P $ $ {\cal{I}}^Z $ $ {\cal{I}}^c $ $ {\cal{I}}^{mc} $ System P $ \checkmark$ $ \checkmark$ $ \checkmark$ $ \checkmark$ (wSM) $ \checkmark$ $ \checkmark$ $ \checkmark$ $ \checkmark$ (SM) $ \checkmark$ − − − (Rel) $ \checkmark$ $ \checkmark$ $ \checkmark$ $ \checkmark$ (Ind) − − $ \checkmark$ $ \checkmark$ (SynSplit) − − $ \checkmark$ $ \checkmark$ (CRel) $ \checkmark$ $ \checkmark$ $ \checkmark$ $ \checkmark$ (CInd) − − $ \checkmark$ $ \checkmark$ (CSynSplit) − − $ \checkmark$ $ \checkmark$ (CP) $ \checkmark$ $ \checkmark$ $ \checkmark$ $ \checkmark$ (wRM) − $ \checkmark$ $ \checkmark$ $ \checkmark$ (RM) − $ \checkmark$ − $ \checkmark$ Example 12. We extend the Tweety example from Example 1 by the conditional
$ \delta_4 = (e|b) $ $ \Delta_{\mathrm{bfpe}} = \{ \delta_1, \ldots, \delta_4 \} $ $ \delta_1 = (b|p), \qquad \delta_2 = (f|b), \qquad \delta_3 = ({\overline f }|p), \qquad \delta_4 = (e|b), $ over the signature
$ \Sigma = \{ b, f, p, e\} $ $ \Omega(\Sigma) $ $ \Delta_{\mathrm{bfpe}} $ $ \Delta_{\mathrm{bfpe}} $ $ Z(\Delta_{\mathrm{bfpe}}) = (\Delta_1, \Delta_2) $ $ \Delta_1 = \{ \delta_2, \delta_4 \} $ $ \Delta_2 = \{ \delta_1, \delta_3 \} $ $ \Delta_{\mathrm{bfpe}} $ $ (Z(\delta_1), \ldots, Z(\delta_4)) = (2, 1, 2, 1) $ $ \kappa^Z_{\Delta_{\mathrm{bfpe}}} $ $ \Delta_{\mathrm{bfpe}} $ $ \Delta_{\mathrm{bfpe}} $ $ \vec{\eta}^{\, mc}_{\Delta_{\mathrm{bfpe}}} = (2, 1, 2, 1) $ $ {\mathrm{CSP}}(\Delta_{\mathrm{bfpe}}) $ $ {\mathrm{CSP}}^\wedge(\Delta_{\mathrm{bfpe}}) $ $ \eta_1 \gt \min\{ \eta_2, \eta_3\} $ $ \eta_2 \gt 0 $ $ \eta_3 \gt \min\{\eta_1, \eta_2\} $ $ \eta_4 \gt 0 $ $ \kappa^{mc}_{\Delta_{\mathrm{bfpe}}} $ $ \Delta_{\mathrm{bfpe}} $ $ \kappa^{\vec{\eta}}_{\Delta_{\mathrm{bfpe}}} $ $ \Delta_{\mathrm{bfpe}} $ $ \vec{\eta} = (2,1,2,4) $ Table 6. Verified and falsified conditionals from $ \Delta_{\mathrm{bfpe}} $ as well as the System Z ranking model $ \kappa^Z_{\Delta_{\mathrm{bfpe}}} $, the minimal core c-representation $ \kappa^{mc}_{\Delta_{\mathrm{bfpe}}} $, and the c-representation $ \kappa^{\vec{\eta}}_{\Delta_{\mathrm{bfpe}}} $ induced by $ \vec{\eta} = (2,1,2,4) $ (cf. Example 12).
$ \omega $ $ {\mathrm{ver}}_{\Delta_{\mathrm{bfpe}}}(\omega) $ $ {\mathrm{fal}}_{\Delta_{\mathrm{bfpe}}} (\omega) $ $ \kappa^Z_{\Delta_{\mathrm{bfpe}}}(\omega) $ $ \kappa^{\, mc}_{\Delta_{\mathrm{bfpe}}}(\omega) $ $ \kappa^{\vec{\eta}}_{\Delta_{\mathrm{bfpe}}}(\omega) $ $ bfpe $ $ \{ \delta_1, \delta_2, \delta_4 \} $ $ \{ \delta_3 \} $ 2 2 2 $ bfp{\overline e } $ $ \{ \delta_1, \delta_2 \} $ $ \{ \delta_3, \delta_4 \} $ 2 3 6 $ bf\,{\overline p }e $ $ \{ \delta_2, \delta_4 \} $ $ \emptyset $ 0 0 0 $ bf\,{\overline p }\,{\overline e } $ $ \{ \delta_2 \} $ $ \{ \delta_4 \} $ 1 1 4 $ b{\overline f }pe $ $ \{ \delta_1, \delta_3, \delta_4 \} $ $ \{ \delta_2 \} $ 1 1 1 $ b{\overline f }p{\overline e } $ $ \{ \delta_1, \delta_3 \} $ $ \{ \delta_2, \delta_4 \} $ 1 2 5 $ b{\overline f }\,{\overline p }e $ $ \{ \delta_4 \} $ $ \{ \delta_2 \} $ 1 1 1 $ b{\overline f }\,{\overline p }\,{\overline e } $ $ \emptyset $ $ \{ \delta_2, \delta_4 \} $ 1 2 5 $ {\overline b }fpe $ $ \emptyset $ $ \{ \delta_1, \delta_3 \} $ 2 4 4 $ {\overline b }fp{\overline e } $ $ \emptyset $ $ \{ \delta_1, \delta_3 \} $ 2 4 4 $ {\overline b }f\,{\overline p }e $ $ \emptyset $ $ \emptyset $ 0 0 0 $ {\overline b }f\,{\overline p }\,{\overline e } $ $ \emptyset $ $ \emptyset $ 0 0 0 $ {\overline b }\,{\overline f }pe $ $ \{ \delta_3 \} $ $ \{ \delta_1 \} $ 2 2 2 $ {\overline b }\,{\overline f }p{\overline e } $ $ \{ \delta_3 \} $ $ \{ \delta_1 \} $ 2 2 2 $ {\overline b }\,{\overline f }\,{\overline p }e $ $ \emptyset $ $ \emptyset $ 0 0 0 $ {\overline b }\,{\overline f }\,{\overline p }\,{\overline e } $ $ \emptyset $ $ \emptyset $ 0 0 0 Table 7. (Reduced) constraint inducing sets of the conditionals in $ \Delta_{\mathrm{bfpe}} $ (cf. Example 12).
$ \delta_i $ $ V_i $ $ F_i $ $ \hat{V}_i $ $ \hat{F}_i $ $ \delta_1 = (b|p) $ $ \{\{\delta_2\},\{\delta_2,\delta_4\},\{\delta_3\},\{\delta_3,\delta_4\}\} $ $ \{\emptyset,\{\delta_3\}\} $ $ \{\{\delta_2\}, \{\delta_3\}\} $ $ \{\emptyset\} $ $ \delta_2 = (f|b) $ $ \{\emptyset,\{\delta_3\},\{\delta_3,\delta_4\},\{\delta_4\}\} $ $ \{\emptyset,\{\delta_4\}\} $ $ \{\emptyset\} $ $ \{\emptyset\} $ $ \delta_3 = ({\overline f }|p) $ $ \{\{\delta_1\},\{\delta_2\},\{\delta_2,\delta_4\}\} $ $ \{\emptyset,\{\delta_1\},\{\delta_4\}\} $ $ \{\{\delta_1\},\{\delta_2\}\} $ $ \{\emptyset\} $ $ \delta_4 = (e|b) $ $ \{\emptyset,\{\delta_2\},\{\delta_3\}\} $ $ \{\emptyset,\{\delta_2\},\{\delta_3\}\} $ $ \{\emptyset\} $ $ \{\emptyset\} $ Because
$ \kappa^Z_{\Delta_{\mathrm{bfpe}}}(pe) = 1 \not< 1 = \kappa^Z_{\Delta_{\mathrm{bfpe}}}(p{\overline e }) $ 
$ (e|p) $ $ \Delta_{\mathrm{bfpe}} $ $ \kappa^{mc}(pe) = 1 \lt 2 = \kappa^{mc}(p{\overline e }) $ $ \Delta_{\mathrm{bfpe}} |\!\!\!\sim ^{mc} (e|p) $ $ \Delta_{\mathrm{bfpe}} |\!\!\!\sim ^{mc} (b|(b \lor p)f{\overline e }) $ $ \kappa^{mc}(bf{\overline e }) = 1 \lt 4 = \kappa^{mc}({\overline b }fp{\overline e }) $ 
$ \kappa^{\vec{\eta}}(bf{\overline e }) = 4 \not< 4 = \kappa^{\vec{\eta}}({\overline b }fp{\overline e }) $ $ \vec{\eta} = (2,1,2,4) $ At this point, it is worth noting that the satisfaction of inference properties is not inherently desirable; rather, their value depends on the application. For example, semi-monotony can be seen as a very strong property of a nonmonotonic inference operator that may be advantageous in some contexts, but undesirable in others.
In the study by Casini et al.[23], inference relations which satisfy System P, (RM), and (CP) are called basic defeasible entailment relations. Therefore, c-core closure can be classified as a basic defeasible entailment operator. In summary, c-core closure benefits from the simple structure of the minimal core c-representations which are stratified like System Z while it inherits beneficial properties from the more complex framework of general c-reasoning.
-
In the light of minimal core c-representations, the transformation rules R1–R6, which help simplify the constraint satisfaction problems induced by c-representations, appear to be relevant even from a structural point of view. First, rules R3–R5 remove irrelevant dependencies among the conditionals before pruning the
$ F_i $ $ F_i $ $ \phi_{{\cal{Q}}_{\vec{\eta}}(\Delta)}^{\vec{\eta}}(\delta_l) $ $ \hat{V}_i $ $ \hat{F}_i $ Core c-representations
$ \kappa^{\vec{\eta},c}_\Delta $ $ \eta_i \gt 0 $ $ i \in [n] $ $ \Delta $ $ \kappa^{\vec{\eta},c}_\Delta $ $ \eta_i = 0 $ $ \Delta $ Example 13. We consider the belief base
$ \Delta_{{\mathrm{ex}}5} = \{ (c|a), (c|ab), (c|a{\overline b }) \} $ $ {\mathrm{CSP}}(\Delta_{{\mathrm{ex}}5}) $ $ \eta_1 \gt - \min\{\eta_2,\eta_3\}, \qquad \eta_2 \gt - \eta_1, \qquad \eta_3 \gt - \eta_1, $ and has the pareto-minimal solutions
$ (1,0,0) $ $ (0,1,1) $ $ \kappa_{\Delta_{{\mathrm{ex}}5}} $ $ ab{\overline c } $ $ a{\overline b }{\overline c } $ $ \eta_1 + \eta_2 $ $ \eta_1 + \eta_3 $ $ (0,1,1) $ $ {\mathrm{CSP}}(\Delta_{{\mathrm{ex}}5}) $ $ \delta_1 $ $ \eta_1 $ $ \eta_2 $ $ \eta_3 $ $ \delta_1 $ $ \Delta_{{\mathrm{ex}}5} $ $ \Delta_{{\mathrm{ex}}5} $ $ \vec{\eta}^{\,mc}_{\Delta_{{\mathrm{ex}}5}} = (1,1,1) $ $ ab{\overline c } $ $ a{\overline b }{\overline c } $ Table 8. Verified and falsified conditionals from $ \Delta_{{\mathrm{ex}}5} $ in Example 13.
$ \omega $ $ {\mathrm{ver}}_{\Delta_{{\mathrm{ex}}5}}(\omega) $ $ {\mathrm{fal}}_{\Delta_{{\mathrm{ex}}4}}(\omega) $ $ \omega $ $ {\mathrm{ver}}_{\Delta_{{\mathrm{ex}}5}}(\omega) $ $ {\mathrm{fal}}_{\Delta_{{\mathrm{ex}}4}}(\omega) $ $ abc $ $ \{\delta_1,\delta_2\} $ $ \emptyset $ $ {\overline a b}c $ $ \emptyset $ $ \emptyset $ $ ab{\overline c } $ $ \emptyset $ $ \{\delta_1,\delta_2\} $ $ {\overline a b}{\overline c } $ $ \emptyset $ $ \emptyset $ $ a{\overline b }c $ $ \{\delta_1,\delta_3\} $ $ \emptyset $ $ {\overline a \overline b }c $ $ \emptyset $ $ \emptyset $ $ a{\overline b }{\overline c } $ $ \emptyset $ $ \{\delta_1,\delta_3\} $ $ {\overline a \overline b }{\overline c } $ $ \emptyset $ $ \emptyset $ Example 13 suggests to remove redundant conditionals from belief bases before performing core c-reasoning. However, clarifying what 'redundant' means, besides the semantical equivalent conditionals which we already excluded in this paper, is a hard problem in general. For instance, in Example 13, it is not easy to decide which of the conditionals are in fact redundant. For building up the c-representation
$ \kappa_{\Delta_{{\mathrm{ex}}5}} $ $ \{(c|a)\} $ $ \{(c|ab), (c|a{\overline b })\} $ $ \{(c|a)\} $ $ \{(c|ab), (c|a{\overline b })\} $ $ ({\overline c }|ab) $ $ \{(c|a)\} $ $ \{(c|ab), (c|a{\overline b }\} $ $ (c|ab) $ $ ({\overline c }|ab) $ As an alternative, in the study by Goldszmidt et al.[33] the authors define a subclass of belief bases, the so-called minimal core sets, which exclude belief bases
$ \Delta $ $ \eta_i=0 $ $ \delta_i \in \Delta $ Definition 16 (Minimal Core Set[33]). A consistent belief base
$ \Delta $ $ (B|A) \in \Delta $ $ ({\overline B }|A) $ $ \Delta \setminus \{(B|A)\} $ $ (B|A) \in \Delta $ $ (B|A) $ $ \Delta $ In other words,
$ \Delta $ $ \emptyset \in F_i $ $ i \in [n] $ $ \Delta_{\mathrm{bfpe}} $ Proposition 18. Let
$ \Delta $ $ \kappa^{\vec{\eta}}_\Delta $ $ \Delta $ $ \Delta $ $ \Delta $ $ \kappa^{mc}_\Delta $ Proof. Because for minimal core sets
$ \Delta $ $ \Delta $ $ \Delta $ $ \Delta $ $ \kappa^{mc}_\Delta $ $ \Delta $ $ \kappa^{mc}_\Delta $ $ \Delta $ □ Minimal core sets do not precisely characterize the belief bases which enforce the impact factors to be positive, though, and, conversely, not all belief bases which allow for non-positive impact factors automatically involve 'redundant' conditionals (cf. Example 5 in the study by Goldszmidt et al.[33]). Thus, a thorough investigation of this issue remains for future work.
The main topic of the study by Goldszmidt et al.[33] is the derivation of a ranking model
$ \kappa^\ast $ $ \Delta $ $ \epsilon $ $ \{{\cal{P}}^\ast_\epsilon \} $ $ \Omega(\Sigma) $ $ \epsilon \gt 0 $ $ {\cal{P}}^\ast_\epsilon $ $ \epsilon $ $ \Delta $ $ {\cal{P}}^\ast_\epsilon(B_i|A_i) \geq 1 - \epsilon $ $ i \in [n] $ $ {\cal{H}}({\cal{P}}_\epsilon) = - \sum\nolimits_{\omega\in\Omega(\Sigma)} {\cal{P}}_\epsilon(\omega) \cdot \log {\cal{P}}_\epsilon(\omega) $ $ \epsilon $ $ {\cal{P}}_\epsilon $ $ \Delta $ $ \kappa^* $ $ \Delta $ $ A |\!\!\!\sim _{\kappa^*} \!\! B $ $ \lim_{\epsilon \to 0} {\cal{P}}^\ast_\epsilon(B|A) = 1 $ $ \Delta $ $ \kappa^\ast $ $ \kappa^\ast(\omega) = \sum\nolimits_{\delta_i \in {\mathrm{fal}}_\Delta(\omega)} Z^\ast(\delta_i) $ $ Z^\ast(\delta_i) = \min_{\omega \in {\mathrm{ver}}(\delta_i)} \kappa^\ast(\omega) + 1 $ $ \kappa^\ast $ $ \kappa^\ast $ $ \kappa^\ast $ -
With core c-representations we identified a subclass of c-representations which constitute a family of ranking models of symbolic conditional belief bases with particularly good inference behavior. Core c-representations are easier to compute than general c-representations as the underlying constraint satisfaction problem is stratified while the constraint satisfaction problems of general c-representations may involve cyclic dependencies. As a consequence, core c-representations provide a unique minimal ranking model of a conditional belief base, which makes it possible to define a novel, model-based inference operator that selects for each consistent belief base its minimal core c-representation. We prove that this c-core closure inference operation constitutes a basic defeasible entailment operator according to the study by Casini et al.[23], and differs from System P inference, System Z inference, as well as skeptical c-inference. c-Core closure inference synergizes all good properties of c-representations, complies with conditional syntax splitting, and avoids the drowning problem, while also satisfying rational monotony (RM) and implementing the idea of minimality, i.e., maximal plausibility, in a unique way, for the first time.
In future work, we want to investigate to what extent ideas from the construction of the minimal core c-representation can be transferred to the computation of general c-representations. We would also like to investigate complexity issues, and the question whether there is an axiomatization of c-core closure. A further research direction is to analyze how core c-representations behave under belief change, especially (iterated) belief revision, and we are also interested in a comparison of c-core closure with other inference formalisms that have proven to be inferentially strong such as lexicographic entailment[36,37], and System W[38,39].
This work was supported by Grant KE 1413/14-1 of the German Research Foundation (DFG) awarded to Gabriele Kern-Isberner.
-
The main work was carried out by Marco Wilhelm, while Gabriele Kern-Isberner and Christoph Beierle contributed particularly to the parts on strategic c-representations and syntax splitting. All authors reviewed the results and approved the final version of the manuscript.
-
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
-
The authors declare that they have no conflict of interest.
- Copyright: © 2026 by the author(s). Published by Maximum Academic Press, Fayetteville, GA. This article is an open access article distributed under Creative Commons Attribution License (CC BY 4.0), visit https://creativecommons.org/licenses/by/4.0/.
-
About this article
Cite this article
Wilhelm M, Kern-Isberner G, Beierle C. 2026. c-Core closure and syntax splitting for conditional belief bases. The Knowledge Engineering Review 41: e002 doi: 10.48130/ker-0026-0002 

c-Core closure and syntax splitting for conditional belief bases
- Received: 12 December 2024
- Revised: 28 August 2025
- Accepted: 02 November 2025
- Published online: 23 March 2026
Abstract: With core c-representations we develop a new class of ranking models for conditional belief bases that combine the advantages of c-representations and System Z. On the one hand, they exhibit high-quality inferential behavior, just like c-representations, and on the other hand, they are stratified like the System Z ranking function, and can thus be constructed layer by layer. This allows for the identification of a unique minimal core c-representation from which we derive a new inductive inference operator, the c-core closure operator. This inference operator features conditional syntax splitting, like skeptical c-inference, and therefore does not suffer from the drowning problem, in contrast to System Z. Additionally, c-core closure satisfies rational monotony and inductive enforcement, and belongs to the class of basic defeasible entailment operators.